多智能体系统——具有非线性不确定干扰的多智能体系统的固定时间事件触发一致性控制
Liu J, Yu Y, Wang Q, et al. Fixed-time event-triggered consensus control for multi-agent systems with nonlinear uncertainties[J]. Neurocomputing, 2017, 260: 497-504.
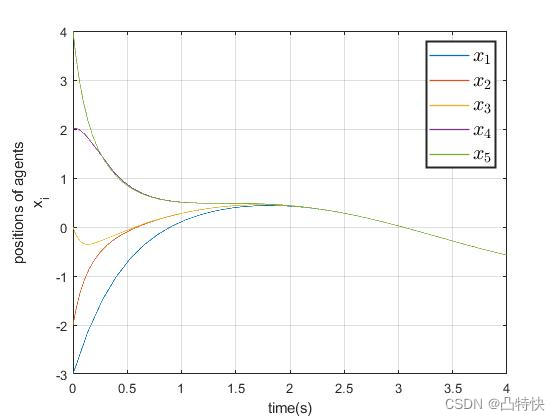
系统模型:
x
˙
i
(
t
)
=
u
i
(
t
)
+
f
(
x
i
(
t
)
,
t
)
\dot{x}_{i}(t)=u_{i}(t)+f\left(x_{i}(t), t\right)
x˙i(t)=ui(t)+f(xi(t),t)
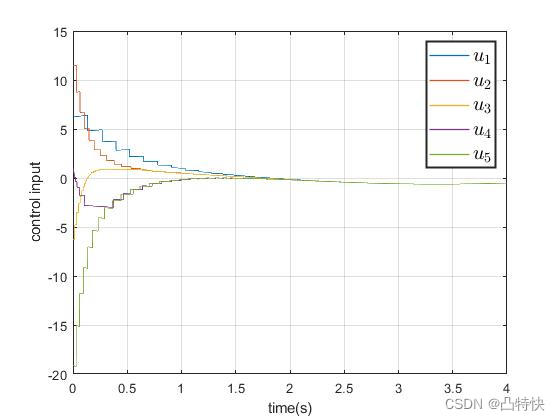
控制协议:
u
i
(
t
)
=
−
c
4
(
∑
j
=
1
M
a
i
j
(
x
i
(
t
c
i
)
−
x
j
(
t
c
i
)
)
)
α
−
c
5
(
∑
j
=
1
M
a
i
j
(
x
i
(
t
c
i
)
−
x
j
(
t
c
i
)
)
)
β
−
c
6
(
∑
j
=
1
M
a
i
j
(
x
i
(
t
c
i
)
−
x
j
(
t
c
i
)
)
)
\begin{aligned} u_{i}(t)= & -c_{4}\left(\sum_{j=1}^{M} a_{i j}\left(x_{i}\left(t_{c}^{i}\right)-x_{j}\left(t_{c}^{i}\right)\right)\right)^{\alpha} \\ & -c_{5}\left(\sum_{j=1}^{M} a_{i j}\left(x_{i}\left(t_{c}^{i}\right)-x_{j}\left(t_{c}^{i}\right)\right)\right)^{\beta}\\ &-c_{6}\left(\sum_{j=1}^{M} a_{i j}\left(x_{i}\left(t_{c}^{i}\right)-x_{j}\left(t_{c}^{i}\right)\right)\right) \end{aligned}
ui(t)=−c4(j=1∑Maij(xi(tci)−xj(tci)))α−c5(j=1∑Maij(xi(tci)−xj(tci)))β−c6(j=1∑Maij(xi(tci)−xj(tci)))
测量误差:
ζ
i
(
t
)
=
c
4
ε
i
α
(
t
)
+
c
5
ε
i
β
(
t
)
+
c
6
ε
i
(
t
)
−
c
4
y
i
α
(
t
)
−
c
5
y
i
β
(
t
)
−
c
6
y
i
(
t
)
\zeta_{i}(t)=c_{4}\varepsilon_{i}^{\alpha}(t)+c_{5}\varepsilon_{i}^{\beta}(t)+c_{6}\varepsilon_{i}(t)-c_{4}y_{i}^{\alpha}(t)-c_{5}y_{i}^{\beta}(t)-c_{6}y_{i}(t)
ζi(t)=c4εiα(t)+c5εiβ(t)+c6εi(t)−c4yiα(t)−c5yiβ(t)−c6yi(t)
y
i
(
t
)
=
∑
j
=
1
M
a
i
j
(
x
i
(
t
)
−
x
j
(
t
)
)
y_{i}(t)=\sum_{j=1}^{M}a_{i j}(x_{i}(t)-x_{j}(t))
yi(t)=∑j=1Maij(xi(t)−xj(t))
ε
i
(
t
)
=
∑
j
=
1
M
a
i
j
(
x
i
(
t
c
i
)
−
x
j
(
t
c
i
)
)
\varepsilon_{i}(t)=\sum_{j=1}^{M}a_{i j}(x_{i}(t_{c}^{i})-x_{j}(t_{c}^{i}))
εi(t)=∑j=1Maij(xi(tci)−xj(tci))
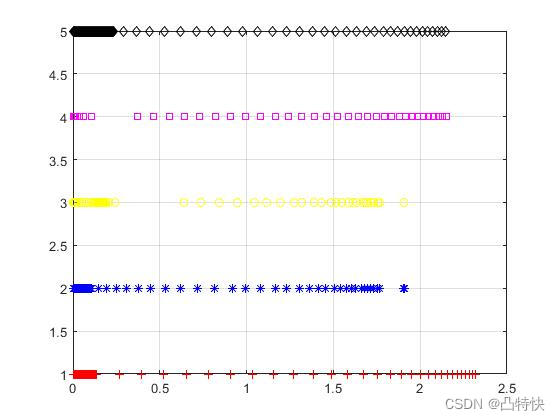
触发函数:
∣
ζ
i
(
t
)
∣
≤
1
2
c
6
∣
y
i
(
t
)
∣
|\zeta_i(t)|\le\dfrac{1}{2}c_6|y_i(t)|
∣ζi(t)∣≤21c6∣yi(t)∣
当
∣
ζ
i
(
t
)
∣
>
1
2
c
6
∣
y
i
(
t
)
∣
|\zeta_i(t)|>\dfrac{1}{2}c_6|y_i(t)|
∣ζi(t)∣>21c6∣yi(t)∣事件触发,在任何事件触发时刻,智能体
i
i
i将更新控制法,测量误差将被设置为零。
//仿真案例