一、KUKA机器人中的旋转角ABC是采用欧拉角来表示的,用来描述机器人的空间姿态。其中A、B、C分别代表绕Z轴、Y轴和X轴的旋转角度,这种旋转是相对于机器人法兰原点进行的。欧拉角描述的旋转顺序是很重要的,因为不同的旋转顺序会得出不同的结果。此外,在KUKA机器人编程中还有“S”和“T”两个重要参数,这两个参数可以反应机器人的静态姿态和运动过程中的姿态,在机器人的移动过程中起到关键作用,可以帮助确定机器人的路径和姿态。例如,当机器人从一点移动到另一点时,会根据设定的“S”和“T”参数来规划一条最优的路径进行移动。但它们并不等于欧拉角,而是有其特殊的意义和用途。
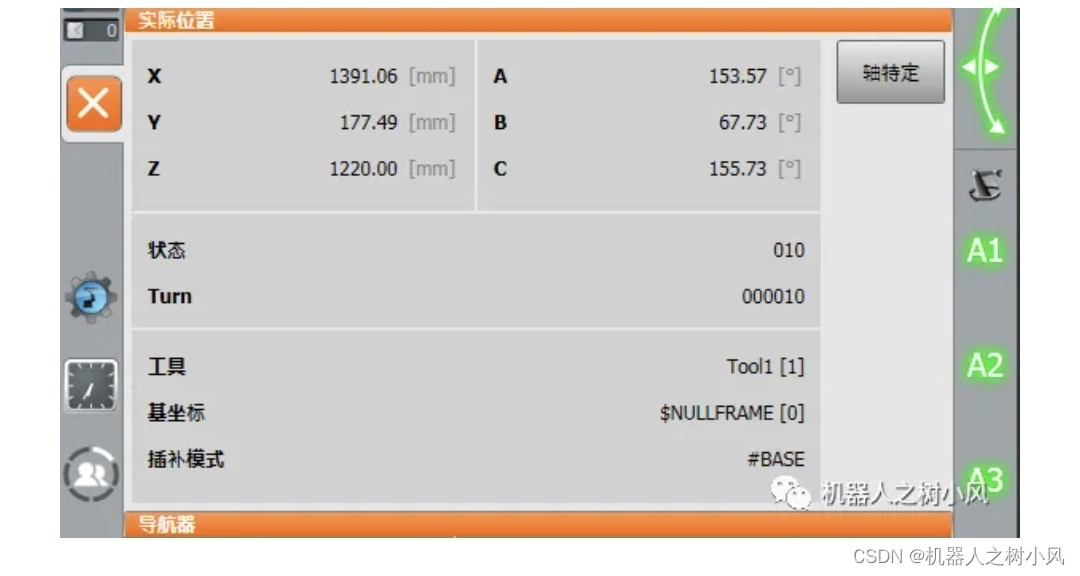
在KUKA机器人示教器上可以查看机器人的实际位置,包括A、B、C以及S(状态)和T(Turn)。如下图:
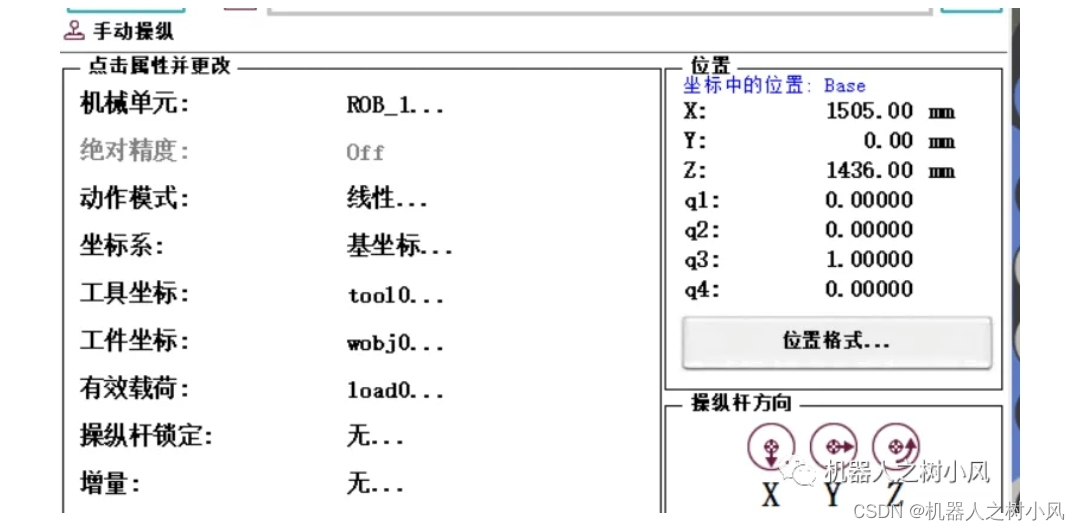
二、而ABB机器人使用的是四元数(q1、q2、q3和q4)来表示机器人的姿态。四元数是一种数学工具,可以用来表示三维空间中的旋转,它比欧拉角更为直观且不易产生"万向锁"问题。例如,当ABB机器人的五个轴都垂直向下时,四元数为[0,0,-1,0]或[0,0,1,0];当五个轴都垂直向上时,四元数为[1,0,0,0]或[-1,0,0,0]。这些四元数可以帮助我们精确地定义机器人在工作空间中的方向。为了方便理解与操作,ABB机器人也提供了欧拉角与四元数之间的转换关系,可以通过特定的函数将欧拉角转换为四元数,也可以将四元数转换为欧拉角。这种转换关系使ABB机器人的控制更为灵活,可以根据具体的应用需求选择最适合的姿态表示方法。
ABB机器人的四元数查看如图:
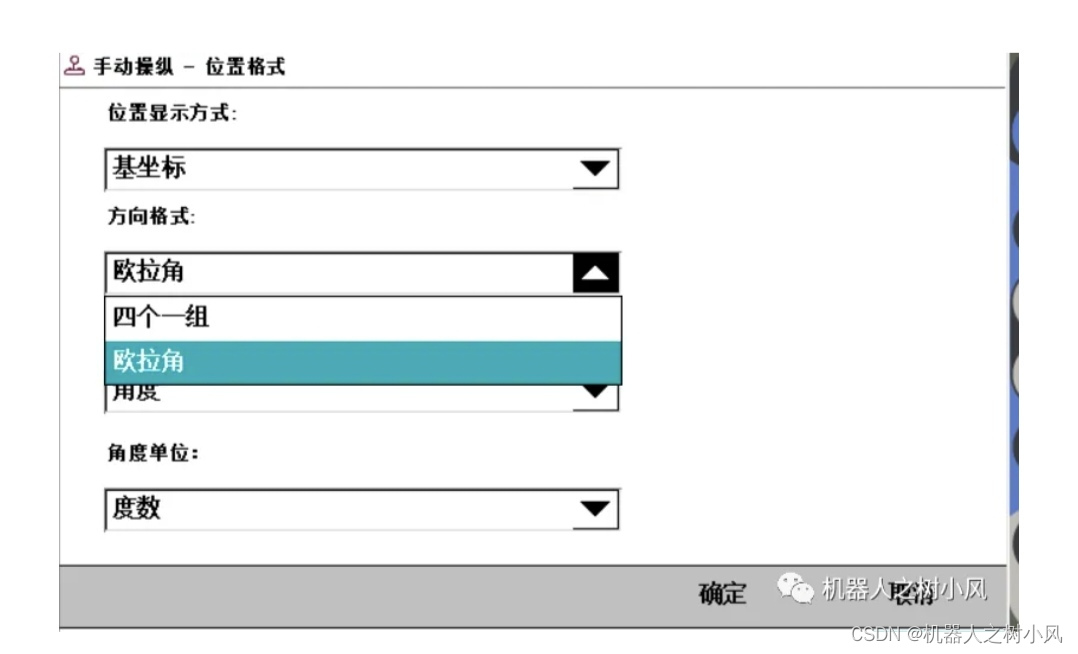
也可以点击【位置格式】,进行【欧拉角】的选择,就可以查看RX、RY、RZ的值了。