SUPS:一种用于自动驾驶的仿真地下泊车场景数据集

附赠自动驾驶学习资料和量产经验:链接
摘要
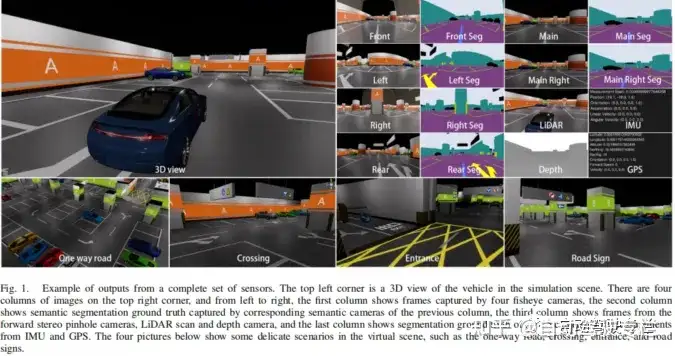
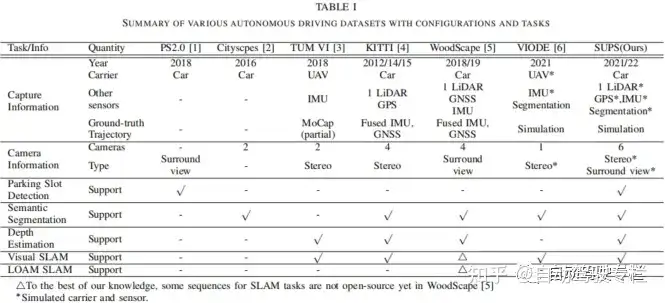
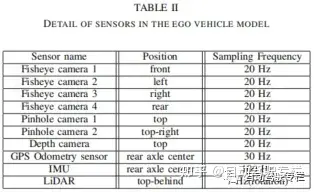
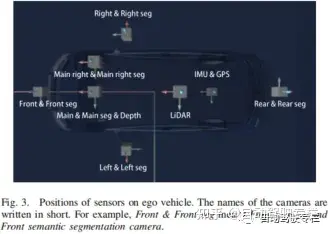
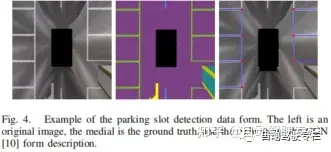
本文介绍了SUPS:一种用于自动驾驶的仿真地下泊车场景数据集。随着自动驾驶的范围扩大,自动地下泊车引起了人们极大的关注。自动驾驶汽车应该获取环境信息、跟踪其位置,并且构建可靠的场景地图。主流解决方案包括经过良好训练的神经网络以及同时定位和见图(SLAM)方法,这些方法需要大量精心标注的图像和多个传感器估计值。然而,缺少具有多个传感器和良好标注图像的地下泊车场景数据集,这些数据集支持SLAM任务和感知任务,例如语义分割和库位检测。在本文中,我们提出了SUPS,这是一种用于地下自动泊车的仿真数据集,其支持使用多个传感器和根据时间戳将多个语义标签与连续图像对齐的多任务。我们计划通过环境的变化和虚拟场景中传感器的多样性和可访问性来弥补现有数据集的缺陷。具体而言,数据集记录了来自四个环视鱼眼相机、两个前视针孔相机、一个深度相机以及来自激光雷达、惯性测量单元(IMU)、GNSS的数据。数据集为目标提供像素级语义标注,尤其是地面标记,例如箭头、库位线、车道和减速带。本数据集支持感知、3D重建、深度估计和SLAM以及其它相关任务。本文还在数据集上评估了最先进的SLAM算法和感知模型。
主要贡献
本文的主要贡献总结如下:
1)本文提出了SUPS,这是一种用于地下自动泊车的仿真数据集,其支持使用多个传感器和根据时间戳将多个语义标签与连续图像对齐的多任务。它允许在地下泊车场景中对SLAM和感知算法的鲁棒性和精度进行基准测试;
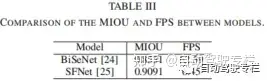
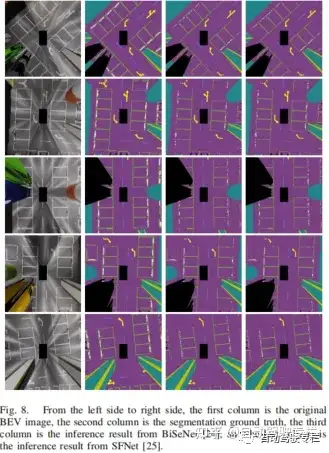
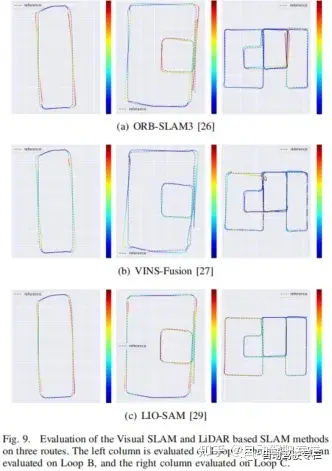
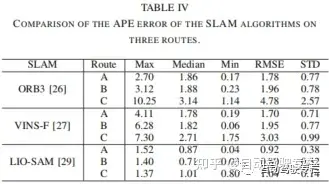
2)本文在数据集上评估了若干种最先进的语义分割和SLAM算法,以证明其在地下泊车场景中的实用性和具有挑战性的难点;
3)本文开源了SUPS数据集和整个地下泊车场景仿真,使得研究人员能够针对特定任务自行设计进行更改。
论文图片和表格


总结
本文提供了SUPS数据集,这是一种新型的感知和SLAM基准,其支持地下泊车场景中的自动驾驶任务,包含完整的传感器,例如环视鱼眼相机、前视针孔相机、深度相机、激光雷达、GNSS和IMU。本文在所提出的数据集上评估了语义分割、库位检测和SLAM算法,以验证其实用性。除了SUPS数据集外,我们开源了仿真器上的虚拟场景和车辆配置,以供用户进行特定调整。
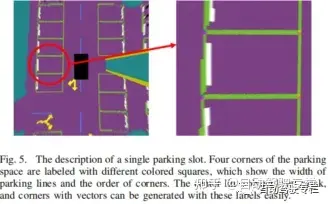
由于我们提供了一个大FOV,其可以在BEV视野中覆盖路侧的完整停车位,因此本文提出了对停车位的特定描述。我们今后研究方向之一为开发目标级检测方法,而不是使用低级别的角点和中心线来描述停车位。目标级目标检测可能比分散结构在随后的运动规划和决策过程中更为有用。








