之前我们已经完成了
- 棋盘格标靶的制作
- 相机内参的标定
接下来我们将实现使用标定后的相机完成图像内棋盘格标靶起始点的三维定位/测距,如下图所示。

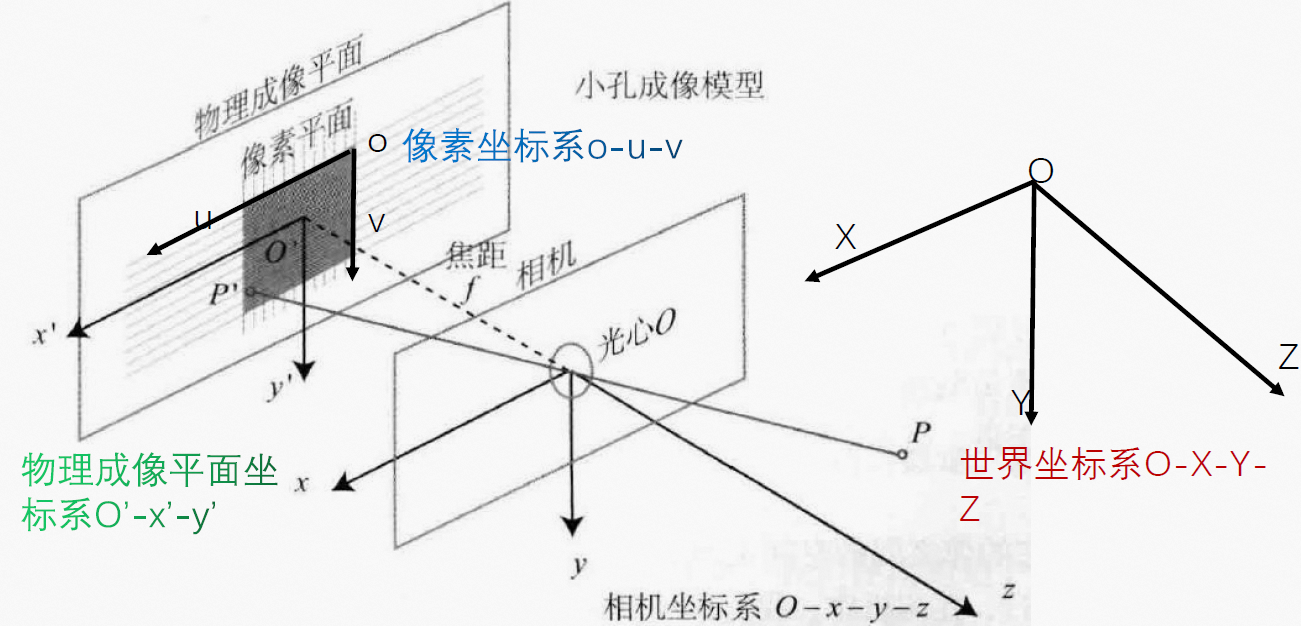
看到这句话我们的第一印象可能是:单目相机如何实现三维测距呢?的确,由于相机的成像结果中丢失了深度信息,我们一般不能恢复图像中某个点的深度。如下图所示,图像中点P'对应的可能是世界坐标系中直线上P'P的任意一个位于相机前方的点。
之前我们已经完成了
接下来我们将实现使用标定后的相机完成图像内棋盘格标靶起始点的三维定位/测距,如下图所示。
看到这句话我们的第一印象可能是:单目相机如何实现三维测距呢?的确,由于相机的成像结果中丢失了深度信息,我们一般不能恢复图像中某个点的深度。如下图所示,图像中点P'对应的可能是世界坐标系中直线上P'P的任意一个位于相机前方的点。
相关推荐










