3D雷达和相机联合标定:一种灵活且精确的基于目标的外参标定方法
- 论文链接:https://arxiv.org/pdf/2307.15264.pdf
附赠自动驾驶学习资料和量产经验:链接
摘要
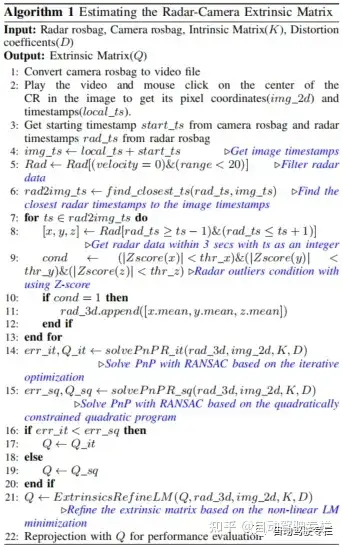
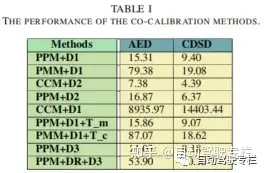
本文介绍了3D雷达和相机联合标定:一种灵活且精确的基于目标的外参标定方法。自动驾驶的进展与传感器融合是分不开的。异构传感器由于其互补性质而被广泛应用于传感器融合,其中雷达和相机是最常装备的传感器。内参和外参标定是传感器融合中的必要步骤。外参标定与传感器自身的参数无关,并且在传感器安装之后进行,这在很大程度上决定了传感器融合的精度。很多基于目标的方法需要繁琐的操作过程和精心设计的实验条件,这使得它们极具挑战性。为此,我们提出了一种灵活、易于复现和精确的3D雷达和相机外参标定方法。本文所提出的方法不需要专门设计的标定环境,而是在地面上放置一个角点反射器(CR),同时使用机器人操作系统(ROS)迭代采集雷达和相机数据,并且基于它们的时间戳获取雷达-相机点的对应关系,然后使用这些点的对应关系作为输入来求解PnP问题,并且最终获得外参标定矩阵。此外,RANSAC被用于提高鲁棒性,而LM非线性优化算法用于改善精度。多个受控环境实验以及真实世界实验证明了本文所提出方法的效率和精度(AED误差为15.31个像素,Acc达到89%)。
主要贡献
本文的贡献总结如下:
1)本文提出了一种基于目标的3D雷达-相机标定方法,其容易操作、易于复现并且结果精确;
2)本文方法使用一个角点反射器作为标定目标,不仅避免了多个标定目标或者支撑它们的三脚架引起的雷达反射干扰,并且有助于其它研究员方便复现实验;
3)本文方法进行异常值滤除以缓解雷达检测稳定性,并且采用RANSAC和LM优化算法确保标定鲁棒性和精确性;
4)多个受控环境实验以及真实世界实验证明了本文所提出方法的效率和精度。
论文图片和表格

总结
在本文中,我们提出了一种3D雷达和相机的外参标定方法。该方法仅使用单个角点反射器作为标定目标,并且对操作没有严格的要求或者规定。所有操作都是将角点反射器自由放置在任意开放空间,并且重复多次以获得足够的标定数据。这使得该方法灵活且易于复现。一系列的受控环境和真实世界实验(包括不同的实验场景和实验目标)证明了所提出方法的精度和鲁棒性。具体而言,其AED为15.31个像素,CDSD为9.40,而人类目标或者车辆目标的ACC分别为89%和66%。今后,我们将探索基于所提出方法的在线标定方法,并且研究精确标定不在同一装置中的传感器的方法。










