文章目录
1.使用Win32Disk image烧录镜像

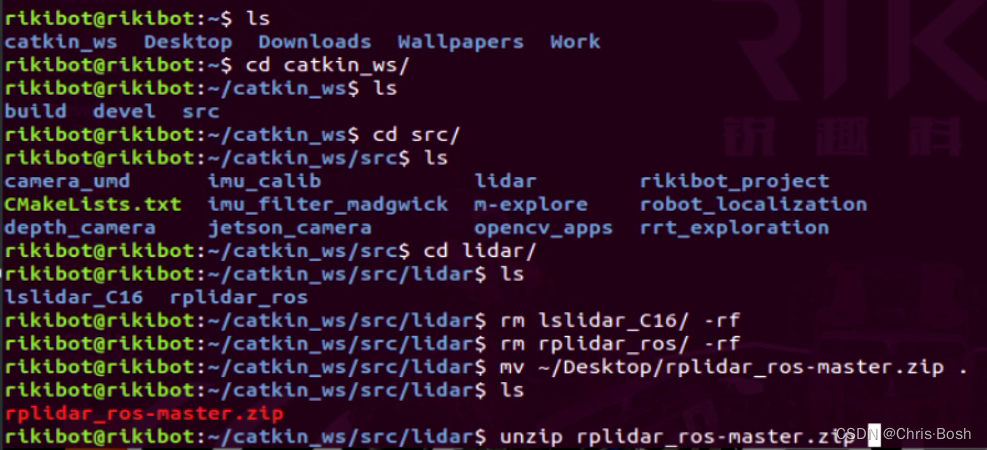
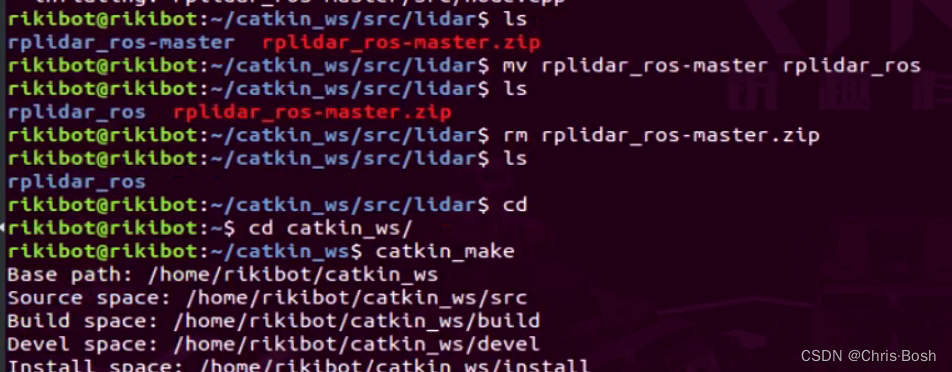
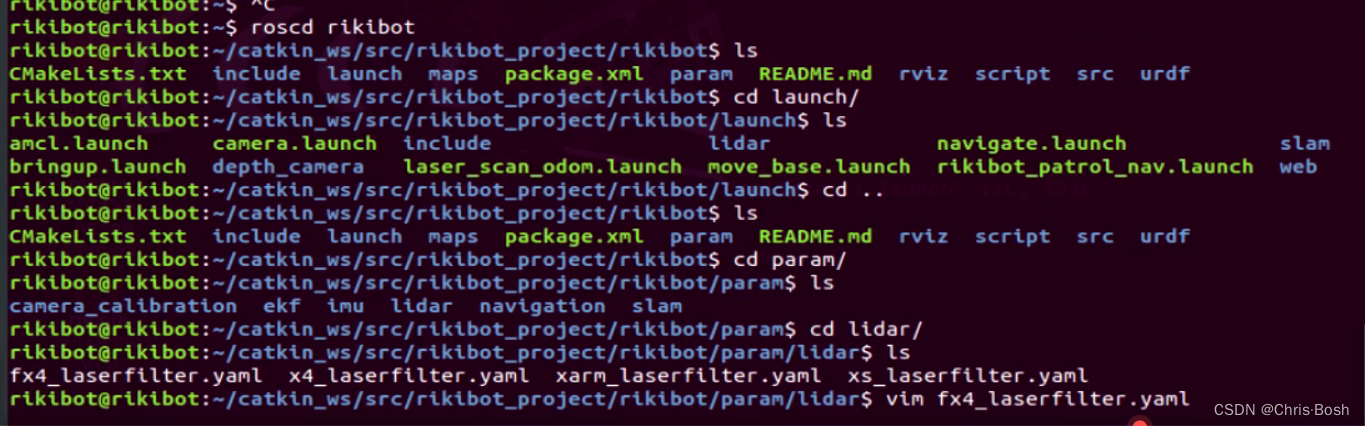
2.将适配的雷达(rplidar)文件移入小车系统

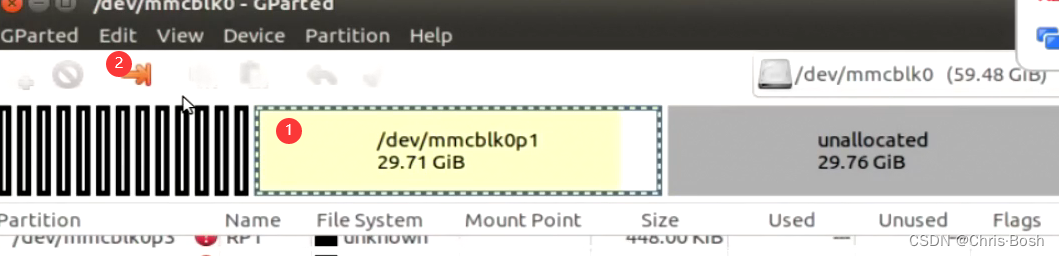
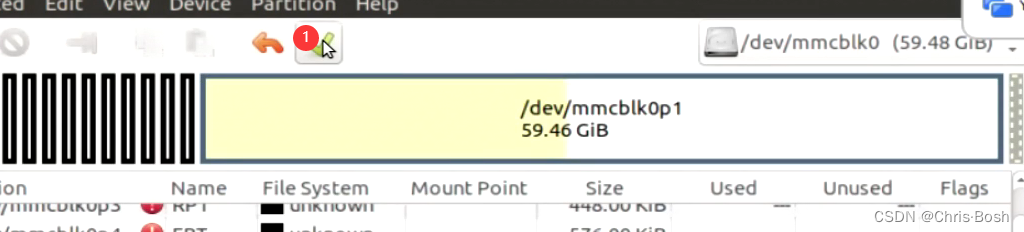
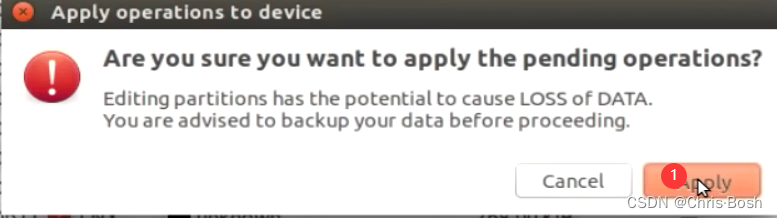
3.扩容操作,扩容后重启

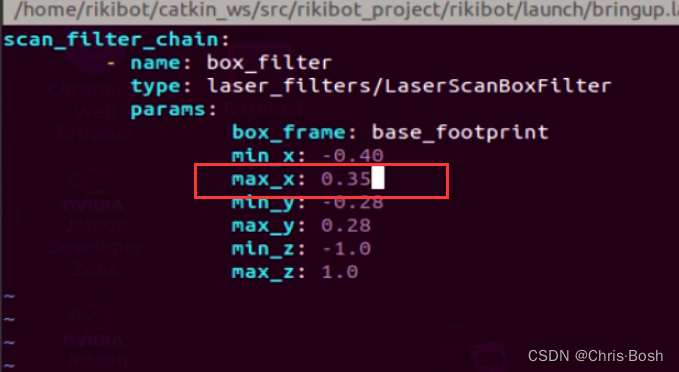
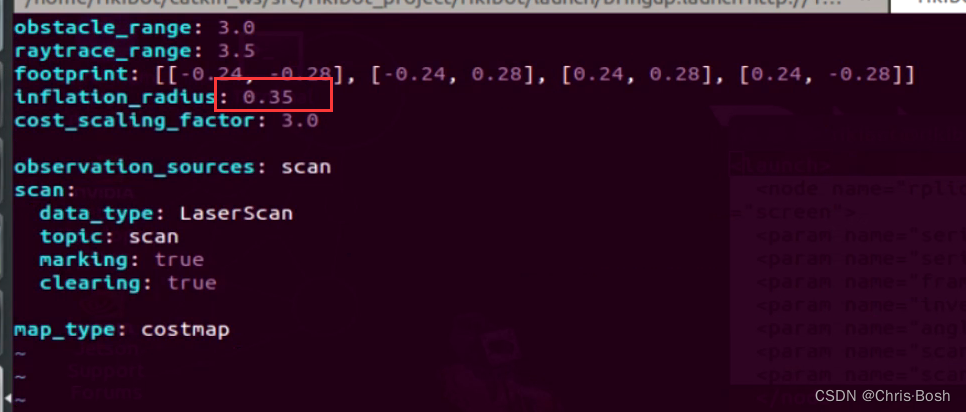
4.修改操作
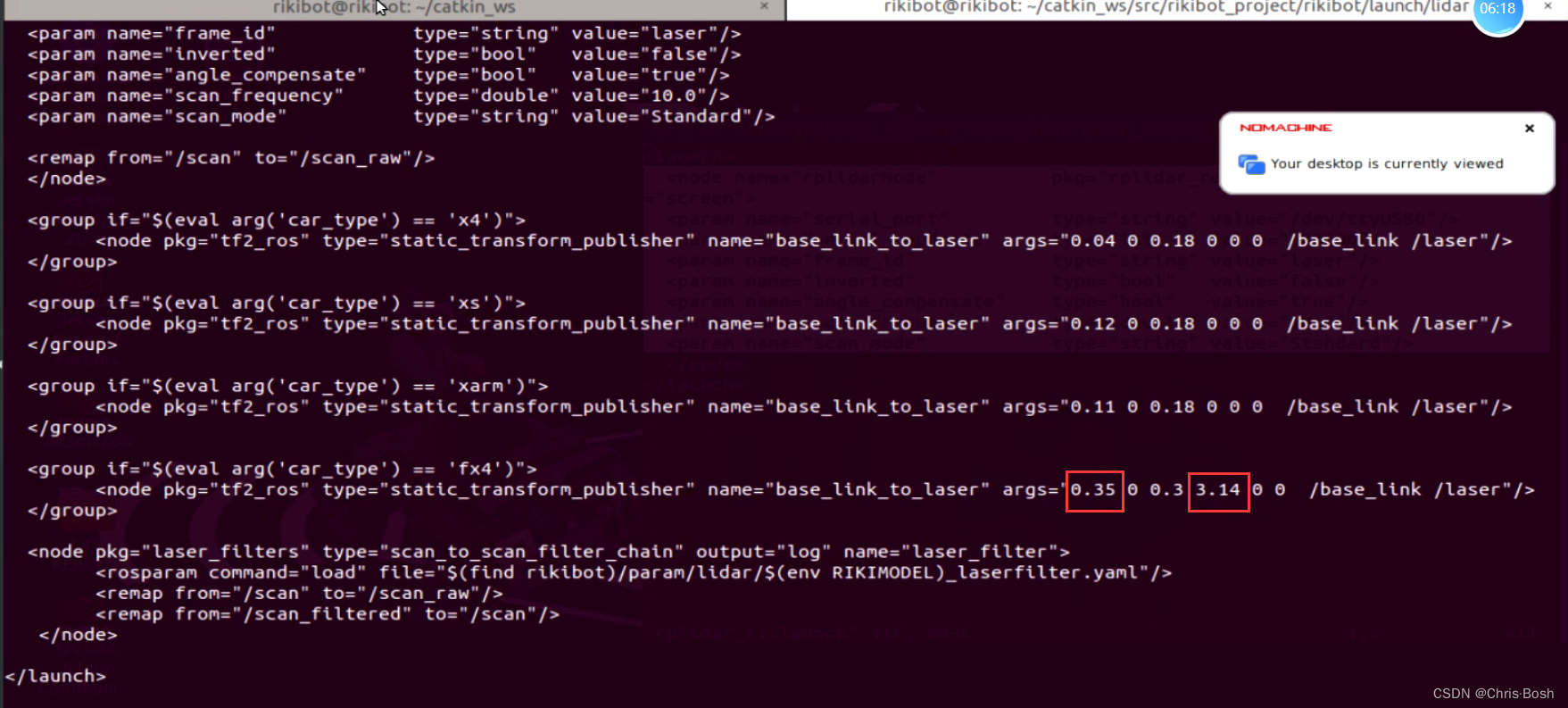
先看下面两步,按照另一个配置文件改!
这个是模板,按照这个改上面的!
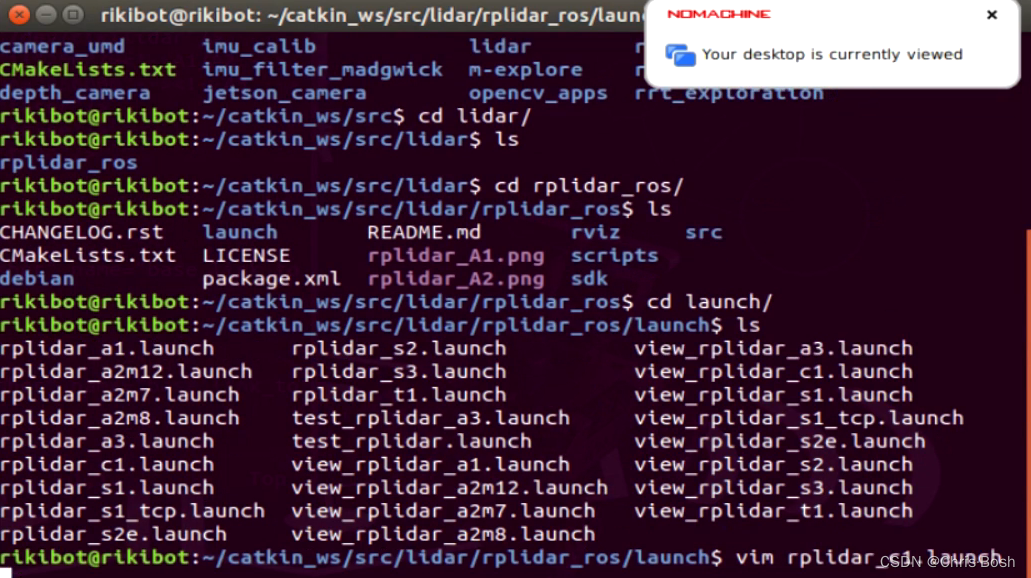

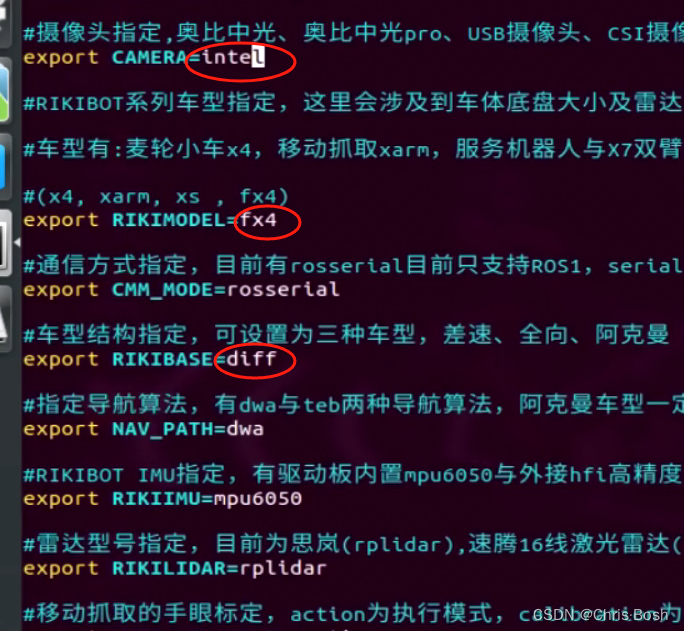
具体修改如下:

然后修改.bashrc文件(在主目录下打开)

然后返回刚才catkin_make的终端
输入此命令!


最后刷新变量

完事!
先看下面两步,按照另一个配置文件改!
这个是模板,按照这个改上面的!
具体修改如下:
输入此命令!
最后刷新变量
完事!
相关推荐










