前提条件:
已经按要求预装ubuntu20.04和rosnoetic。
失败尝试:
ROS机器人虚拟仿真挑战赛蓝桥云课环境配置记录
本文中遇到的问题会写到问题汇总中。
2019年记录:
仿真测试

百工楼走廊真车实测

配置脚本:
提示:将安装过程用人工智能进行分类总结,提升效率。
个人环境使用后会报一个错误的脚本:
sudo apt update
sudo apt install ros-noetic-tf2-geometry-msgs ros-noetic-ackermann-msgs ros-noetic-joy ros-noetic-map-server ros-noetic-message-runtime -y
sudo apt upgrade -y
mkdir -p ~/tianbot_ws/src && cd ~/tianbot_ws/src
git clone https://mirror.ghproxy.com/https://github.com/tianbot/tianracer.git -b dev
sudo apt install ros-noetic-move-base ros-noetic-teb-local-planner ros-noetic-controller-manager ros-noetic-amcl -y
cd ~/tianbot_ws/ && catkin_make
source ~/tianbot_ws/devel/setup.bash
roscd tianracer_gazebo/scripts/ && ./env_config.sh
echo "source ~/tianbot_ws/devel/setup.bash" --extend >> ~/.bashrc
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch修正,加入ros-noetic-effort-controllers:
sudo apt update
sudo apt install ros-noetic-tf2-geometry-msgs ros-noetic-ackermann-msgs ros-noetic-joy ros-noetic-map-server ros-noetic-message-runtime -y
sudo apt upgrade -y
mkdir -p ~/tianbot_ws/src && cd ~/tianbot_ws/src
git clone https://mirror.ghproxy.com/https://github.com/tianbot/tianracer.git -b dev
sudo apt install ros-noetic-move-base ros-noetic-teb-local-planner ros-noetic-controller-manager ros-noetic-amcl ros-noetic-effort-controllers -y
cd ~/tianbot_ws/ && catkin_make
source ~/tianbot_ws/devel/setup.bash
roscd tianracer_gazebo/scripts/ && ./env_config.sh
echo "source ~/tianbot_ws/devel/setup.bash" --extend >> ~/.bashrc
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch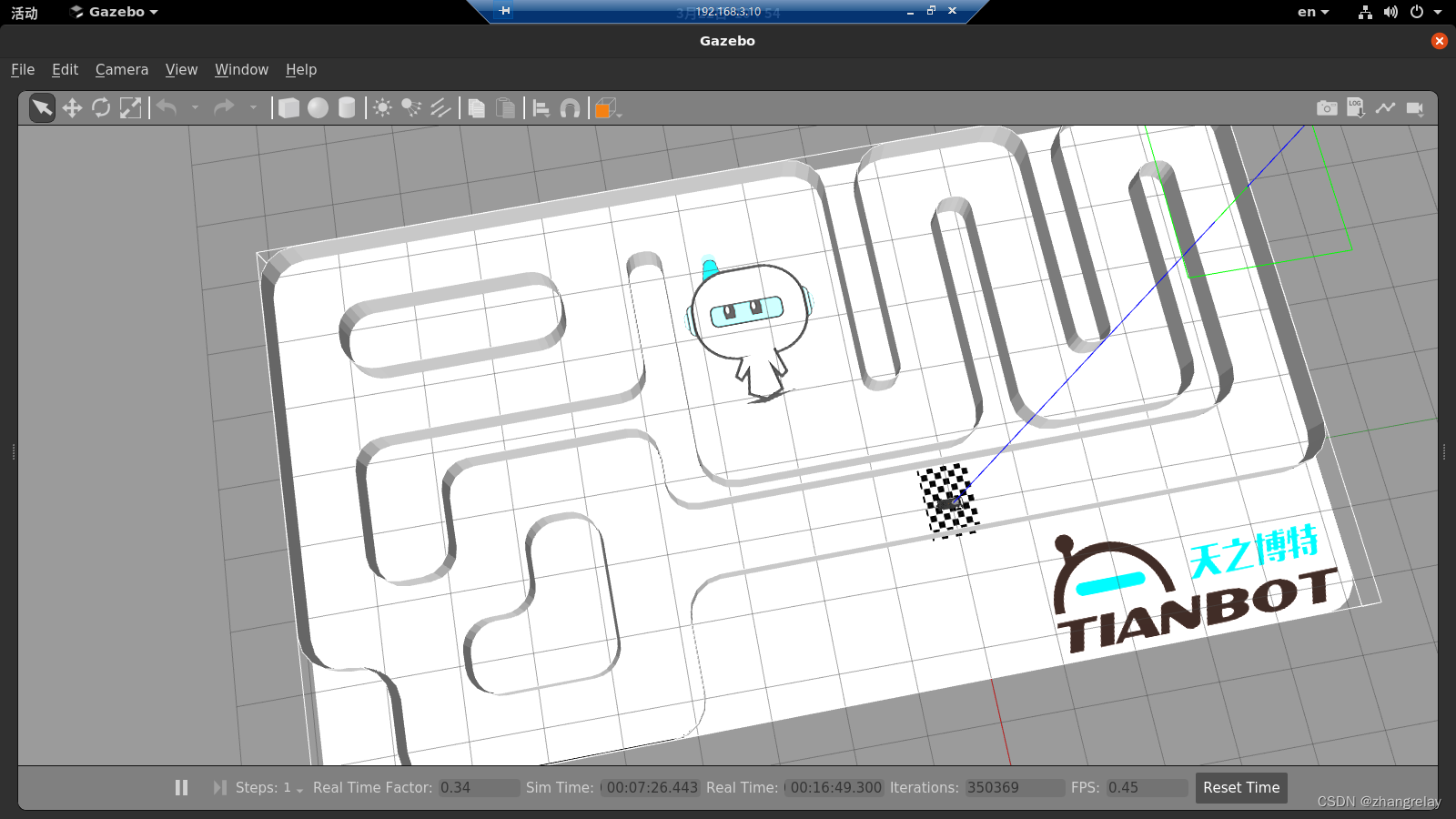
上述过程是一个详细的步骤列表,用于在ROS Noetic环境中设置并运行Tianbot的Tianracer项目。这个过程涉及多个方面,包括更新软件包、安装ROS包、克隆源代码、构建工作空间、配置环境以及启动仿真。以下是对整个过程的详细总结:
首先,通过sudo apt update命令更新系统上的软件包列表,确保可以访问到最新的软件包版本。
接着,使用sudo apt install命令安装一系列必要的ROS Noetic包。这些包涵盖了机器人导航、控制、消息处理等多个方面,是Tianracer项目运行的基础。
然后,创建一个新的ROS工作空间,并在其src子目录中切换到。这是ROS中组织代码和构建包的标准方式。
接下来,通过git clone命令克隆Tianracer项目的源代码。这里使用了ghproxy.com作为GitHub的镜像源,这可以加速克隆过程,尤其是在网络环境不佳的情况下。
安装额外的ROS包后,使用catkin_make命令构建整个ROS工作空间。这个过程会编译所有在src目录中的ROS包,并生成可执行的二进制文件。
随后,通过source命令加载ROS工作空间的设置文件,使得在当前shell会话中可以使用这些包。
然后,导航到Tianracer项目的特定脚本目录,并执行一个配置脚本。这个脚本可能用于设置环境变量或初始化项目所需的配置。
为了方便,将加载ROS工作空间的命令添加到用户的~/.bashrc文件中。这样,每次打开新的shell会话时,都会自动加载这些设置,无需手动执行。
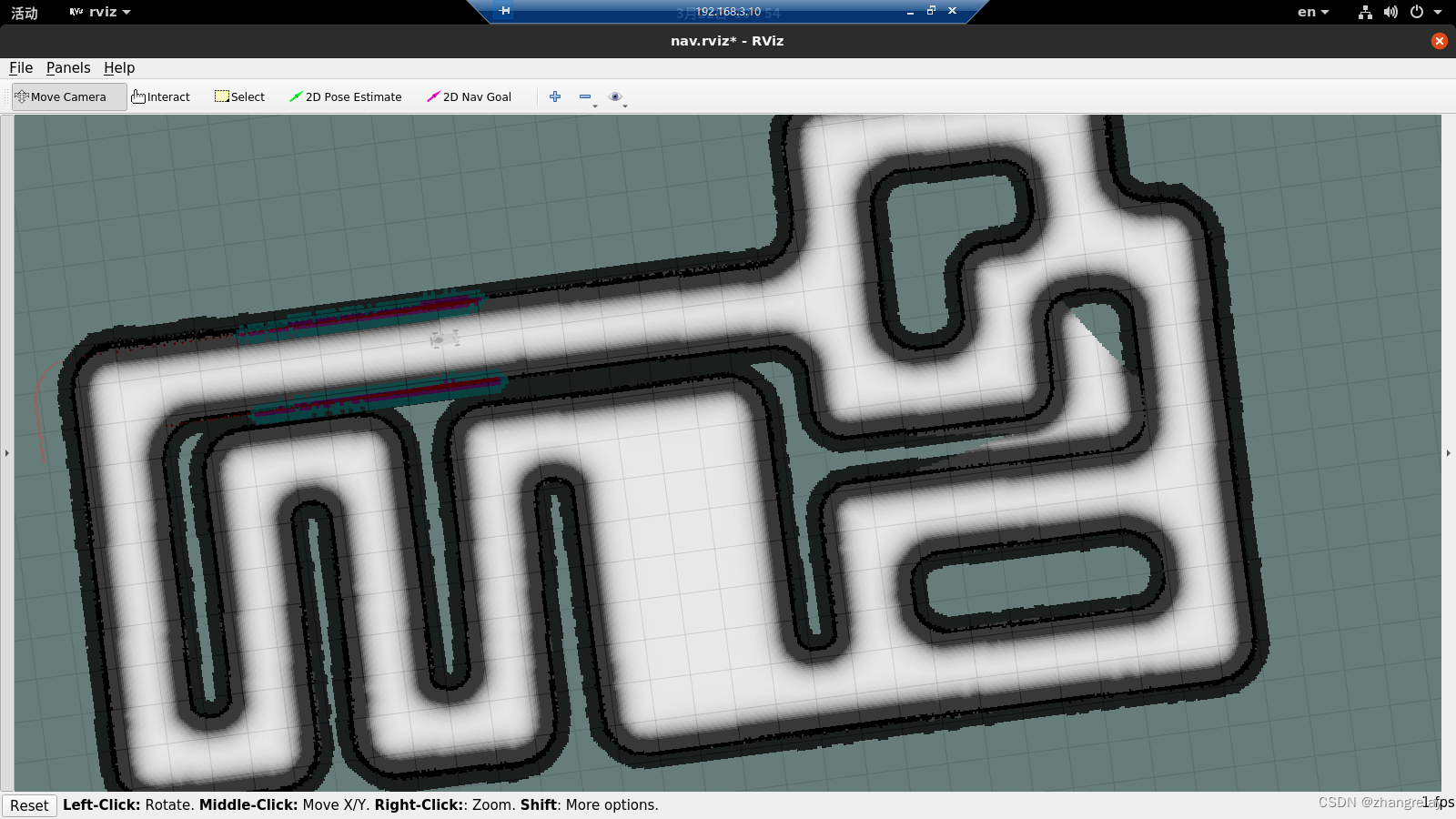
最后,使用roslaunch命令启动Tianracer的Gazebo仿真。这里运行的是一个使用TEB局部规划器的导航演示,它展示了Tianracer在仿真环境中的导航能力。
整个过程从基础的系统更新开始,逐步安装必要的软件,配置环境,并最终运行具体的机器人任务。每一步都是精心设计的,以确保Tianracer项目能够在ROS Noetic环境中顺利运行。这对于机器人开发者来说是一个常见的流程,用于设置和测试新的机器人项目。
过程录屏:
ROS机器人虚拟仿真挑战赛本地电脑环境配置记录
人工智能解释:
这是一系列用于在ROS(Robot Operating System)Noetic发行版中安装和配置Tianbot的Tianracer项目的命令。以下是对这些命令的详细解释:
-
sudo apt update: 更新软件包列表。 -
sudo apt install ros-noetic-tf2-geometry-msgs ros-noetic-ackermann-msgs ros-noetic-joy ros-noetic-map-server ros-noetic-message-runtime -y: 安装一系列ROS Noetic版本的包。这些包包括tf2_geometry_msgs(用于转换几何消息),ackermann_msgs(用于Ackermann驱动的消息),joy(用于从游戏手柄接收输入),map_server(用于地图服务器),和message_runtime(用于ROS消息)。-y选项表示在安装过程中自动接受所有的提示。 -
sudo apt upgrade -y: 升级所有已安装的软件包到最新版本。 -
mkdir -p ~/tianbot_ws/src && cd ~/tianbot_ws/src: 创建一个名为tianbot_ws的目录(如果它不存在的话),并在其src子目录中切换。这通常是ROS工作空间的布局。 -
git clone https://mirror.ghproxy.com/https://github.com/tianbot/tianracer.git -b dev: 使用git克隆Tianbot的Tianracer项目的dev分支到当前目录。这里使用了ghproxy.com作为GitHub的镜像源,用于加速克隆过程。 -
sudo apt install ros-noetic-move-base ros-noetic-teb-local-planner ros-noetic-controller-manager ros-noetic-amcl -y: 安装额外的ROS Noetic包,这些包涉及导航、局部规划、控制器管理和自适应蒙特卡洛定位。 -
cd ~/tianbot_ws/ && catkin_make: 切换回tianbot_ws目录并使用catkin_make构建ROS工作空间。 -
source ~/tianbot_ws/devel/setup.bash: 源设置文件,使ROS工作空间中的包在当前shell会话中可用。 -
roscd tianracer_gazebo/scripts/ && ./env_config.sh: 使用roscd命令导航到tianracer_gazebo包的scripts目录,并执行env_config.sh脚本。这个脚本可能是用来配置环境或设置参数的。 -
echo "source ~/tianbot_ws/devel/setup.bash" --extend >> ~/.bashrc: 将源设置文件的命令添加到~/.bashrc文件的末尾,这样每次打开新的shell会话时都会自动执行它。 -
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch: 使用roslaunch启动Tianracer的Gazebo仿真,并运行一个使用TEB局部规划器的导航演示。
这些命令通常用于设置ROS环境,安装必要的包,克隆源代码,构建项目,并运行特定的仿真或机器人任务。在执行这些命令之前,确保你的系统上已经安装了ROS Noetic,并且你的用户有权执行sudo命令。










