已知:
- 正方形5的左下顶点坐标 ( 80 , 60 ) (80,60) (80,60),边长 150 150 150
- 机器人与障碍物的距离至少超过 10 10 10个单位
- 规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
- 机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为 10 10 10个单位。
- 机器人直线行走的最大速度为 v 0 v_0 v0= 5单位/秒
- 机器人转弯时,最大转弯速度为
v
=
v
(
p
)
=
v
0
/
(
1
+
e
10
−
0.1
p
2
)
v = v(p) = v_0 /( {1+ e^{10-0.1p^2}})
v=v(p)=v0/(1+e10−0.1p2)
其中 p p p是转弯半径。如果超过该速度,机器人将发生侧翻,无法完成行走。 - A点坐标 ( 300 , 300 ) (300,300) (300,300)
需要研究的问题
- 问题:机器人从 O ( 0 , 0 ) O(0,0) O(0,0)出发,到达A的最短时间及其路径
问题:机器人从 O ( 0 , 0 ) O(0,0) O(0,0)出发,到达A的最短时间及其路径
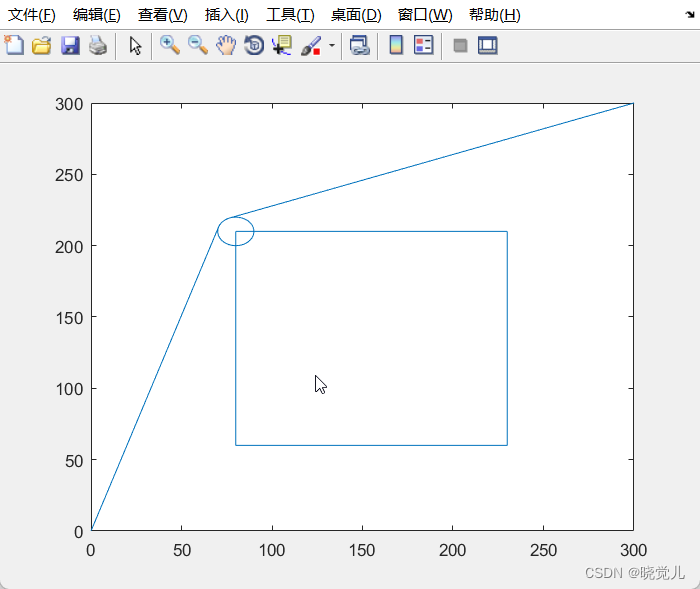
问题1:画出机器人只在正方形左上角拐弯,拐弯半径为10的图
第一问其实是为整个问题服务的 , 也算是先进行一个预测,写一个样例先
MATLAB
基本数据定义:
x = 80;
y = 210;
r = 10;
theta = 0:pi/20:2*pi; %角度[0,2*pi]
hold on;
画一个正方形:
%定义x,y轴范围
xlim([0,300]);
ylim([0,300]);
%四条线形成一个正方形
line([80,80],[60,210]);
line([80,230],[210,210]);
line([80,230],[60,60]);
line([230,230],[60,210]);
在正方形左上角为圆心画圆
plot(x+r*cos(theta),y+r*sin(theta),'-');
接着求切点
建立切点模型:
设切点为
(
x
1
,
x
2
)
(x_1,x_2)
(x1,x2) , 正方形左上角为圆心
(
x
,
y
)
,
x
=
80
;
y
=
210
;
(x,y) , x = 80;y = 210;
(x,y),x=80;y=210; 圆半径
r
=
10
r = 10
r=10 ;切线上除切点另外一点
(
x
2
,
y
2
)
(x_2,y_2)
(x2,y2) ;
即圆外一点
(
x
2
,
y
2
)
(x_2,y_2)
(x2,y2)引两条切线方程
因为切线和切点到圆心的直线垂直
则有
(
x
−
x
2
)
2
+
(
y
−
y
2
)
2
=
r
2
+
(
x
1
−
x
2
)
2
+
(
y
1
−
y
2
)
2
(x-x_2)^2+(y-y_2)^2 = r^2 + (x_1-x_2)^2 + (y_1-y_2)^2
(x−x2)2+(y−y2)2=r2+(x1−x2)2+(y1−y2)2
并且切点在圆上有:
(
x
1
−
x
)
2
+
(
y
1
−
y
)
2
=
r
2
(x_1-x)^2 + (y_1-y)^2 = r^2
(x1−x)2+(y1−y)2=r2
由切点模型和圆外一点 O ( 0 , 0 ) O(0,0) O(0,0)建立方程求解
%这里在命令行窗口求解即可
solve('(px-80)^2+(py-210)^2=100','px^2+py^2+100=210^2+80^2');
排除不符合要求的点
px = 8064/101 - (252*14^(1/2))/101;
%(252*14^(1/2))/101 + 8064/101
%8064/101 - (252*14^(1/2))/101
py = (96*14^(1/2))/101 + 21168/101;
%21168/101 - (96*14^(1/2))/101
%(96*14^(1/2))/101 + 21168/101
由切点模型和圆外一点 A ( 300 , 300 ) A(300,300) A(300,300)建立方程求解
%这里在命令行窗口求解即可
solve('(px-80)^2+(py-210)^2=100','(px-300)^2+(py-300)^2+100=220^2+90^2')
排除不符合要求的点
px2 =9084/113 - (36*141^(1/2))/113;
%(36*141^(1/2))/113 + 9084/113
%9084/113 - (36*141^(1/2))/113
py2 =(88*141^(1/2))/113 + 23748/113;
%23748/113 - (88*141^(1/2))/113
%(88*141^(1/2))/113 + 23748/113
将切线画出来
line([0,px],[0,py]);
line([px2,300],[py2,300]);
问题2:机器人只在正方形左上角拐弯,拐弯半径为10,求路径长度和时间
由问题一的图可知,路径分三段
先求最简单的两段直线长度
pdist([[0,0];[px,py]],'euclidean')
pdist([[300,300];[px2,py2]],'euclidean')
%直线总距离
L2 = pdist([[0,0];[px,py]],'euclidean') + pdist([[300,300];[px2,py2]],'euclidean');
机器人走直线时间
ans1 = L2/v0
再求弧线长度和机器人走弧度时间以及总时间
已知圆上弧长公式为:
l
=
∣
θ
∣
r
,
(
θ
为圆心角,弧度
)
l=|\theta|r , (\theta为圆心角,弧度)
l=∣θ∣r,(θ为圆心角,弧度)
建立圆上两点弧长模型:
设圆上两点分别为
(
x
1
,
y
1
)
,
(
x
2
,
y
2
)
(x_1,y_1),(x_2,y_2)
(x1,y1),(x2,y2)
则弦长为
d
=
(
x
1
−
x
2
)
2
+
(
y
1
−
y
2
)
2
d= \sqrt{(x_1-x_2)^2+(y_1-y_2)^2}
d=(x1−x2)2+(y1−y2)2
设圆心角为
θ
\theta
θ,则圆周角为
θ
/
2
\theta/2
θ/2
连接两点,连接其中一点和圆心并且延长 交圆上一点
(
x
3
,
y
3
)
(x_3,y_3)
(x3,y3) ,连接
(
x
3
,
y
3
)
(x_3,y_3)
(x3,y3)和另外一点,构成直角三角形
可得
s
i
n
(
θ
/
2
)
=
d
/
(
2
r
)
sin(\theta/2) = d / (2r)
sin(θ/2)=d/(2r)
所以
θ
=
2
∗
arcsin
(
d
/
(
2
r
)
)
\theta = 2*\arcsin{(d/(2r))}
θ=2∗arcsin(d/(2r))
弧长
l
=
θ
∗
r
l = \theta * r
l=θ∗r
%求弧度
%圆心角
d=sqrt((px-px2)^2+(py-py2)^2);
therta=2*asin(d/20);
%弧长
L=10*therta;
总时间
%求弧度
%圆心角
d=sqrt((px-px2)^2+(py-py2)^2);
therta=2*asin(d/20);
%弧长
L=10*therta;
%直线总距离
L2 = pdist([[0,0];[px,py]],'euclidean') + pdist([[300,300];[px2,py2]],'euclidean');
v0 = 5;
vp = v0/(1+(exp(1)^(10-0.1*10*10)));
ans1 = L2/v0 + L/vp;
求得为 96.017639004032700
问题3:求出最短时间及其路径
由前两问我们得出了圆上两点弧长模型和建立切点模型
这一问就是结合上面模型,求一个求最小值的最优模型
设直线总长度为
s
1
s_1
s1,弧线总长度为
s
2
s_2
s2
有
min
a
n
s
=
s
1
/
v
0
+
s
2
/
v
\min{ans = s_1/v0 + s_2/v}
minans=s1/v0+s2/v
最优的话拐弯半径和圆心肯定会变化
设转弯圆心为
(
x
,
y
)
(x,y)
(x,y),半径为
r
r
r
分别以
(
0
,
0
)
和
(
300
,
300
)
(0,0)和(300,300)
(0,0)和(300,300)为圆外一点的切点分别为
(
x
1
,
y
1
)
,
(
x
2
,
y
2
)
(x_1,y_1),(x_2,y_2)
(x1,y1),(x2,y2)
由建立切点模型我们可得以下方程
{
x
2
+
y
2
=
r
2
+
x
1
2
+
y
1
2
(
x
1
−
x
)
2
+
(
y
1
−
y
)
2
=
r
2
(
x
−
300
)
2
+
(
y
−
300
)
2
=
r
2
+
(
x
1
−
300
)
2
+
(
y
1
−
300
)
2
(
x
2
−
x
)
2
+
(
y
2
−
y
)
2
=
r
2
\begin{cases} x^2+y^2 = r^2 + x_1^2 + y_1^2 \\ (x_1-x)^2 + (y_1-y)^2 = r^2 \\ (x-300)^2+(y-300)^2 = r^2 + (x_1-300)^2 + (y_1-300)^2\\ (x_2-x)^2 + (y_2-y)^2 = r^2 \end{cases}
⎩
⎨
⎧x2+y2=r2+x12+y12(x1−x)2+(y1−y)2=r2(x−300)2+(y−300)2=r2+(x1−300)2+(y1−300)2(x2−x)2+(y2−y)2=r2
由圆上两点弧长模型和上述切点
(
x
1
,
y
1
)
,
(
x
2
,
y
2
)
(x_1,y_1),(x_2,y_2)
(x1,y1),(x2,y2)可得方程
s
2
=
2
∗
(
arcsin
(
x
1
−
x
2
)
2
+
(
y
1
−
y
2
)
2
/
(
2
r
)
)
∗
r
s_2 = 2 * (\arcsin{\sqrt{(x_1-x_2)^2+(y_1-y_2)^2}/(2r)})*r
s2=2∗(arcsin(x1−x2)2+(y1−y2)2/(2r))∗r
由圆心之间可得直线距离方程
s
1
=
x
2
+
y
2
−
r
2
/
v
+
(
x
−
300
)
2
+
(
y
−
300
)
2
−
r
2
/
v
s_1 = \sqrt{x^2+y^2-r^2}/v + \sqrt{(x-300)^2+(y-300)^2-r^2}/v
s1=x2+y2−r2/v+(x−300)2+(y−300)2−r2/v
或者有上述切点可得直线距离方程为
s
1
=
x
1
2
+
y
1
2
/
v
+
(
x
2
−
300
)
2
+
(
y
2
−
300
)
2
/
v
s_1 = \sqrt{x_1^2+y_1^2}/v + \sqrt{(x_2-300)^2+(y_2-300)^2}/v
s1=x12+y12/v+(x2−300)2+(y2−300)2/v
由于在左上角的时候是极限情况,圆心连接正方形左上角并延长出去距离必须大于等于10可得
r
−
(
x
−
80
)
2
+
(
y
−
210
)
2
≥
10
r - \sqrt{(x-80)^2 + (y-210)^2}\ge10
r−(x−80)2+(y−210)2≥10
LINGO求解
data:
v0 = 5;
e = 2.71828;
enddata
s = 2*r * @asin(@sqrt((x1-x2)^2 + (y1-y2)^2)/(2*r));
v = v0 / (1+e^(10-0.1*r^2));
min = @sqrt(x^2 + y^2 - r^2)/5 + @sqrt((x-300)^2 + (y-300)^2 - r^2 )/5 + s/v;
x1^2 + y1^2 + r^2 = x^2 + y^2;
(x2 - 300)^2 + (y2-300)^2 + r^2 = (x-300)^2 + (y-300)^2;
(x1-x)^2 + (y1-y)^2 = r^2;
(x2-x)^2 + (y2-y)^2 = r^2;
r-@sqrt((x-80)^2+(y-210)^2)>=10;
x1<80;
y2>210;
x>=80 ; x<=230;
y>=60; y<=210;
得出
Objective value: 94.22825
Objective bound: 94.22825
Variable Value Reduced Cost
V0 5.000000 0.000000
E 2.718280 0.000000
S 11.78994 0.000000
R 12.98856 0.000000
X1 69.80452 0.000000
X2 77.74917 0.000000
Y1 211.9779 0.000000
Y2 220.1387 0.000000
V 4.994814 0.000000
X 82.14139 0.000000
Y 207.9153 0.000000
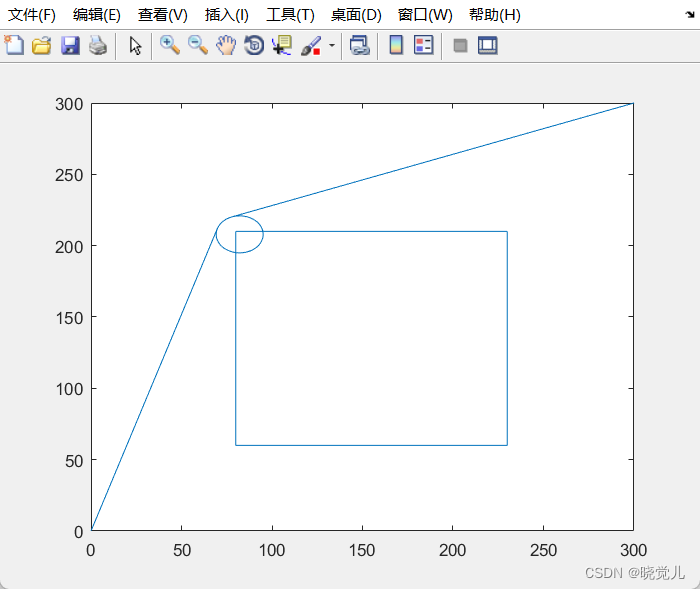
将数据带入前两问已经写好的MATLAB中可得图像
x = 82.14139;
y = 207.9153;
r = 12.98856;
theta = 0:pi/20:2*pi; %角度[0,2*pi]
plot(x+r*cos(theta),y+r*sin(theta),'-');
hold on;
xlim([0,300]);
ylim([0,300]);
line([80,80],[60,210]);
line([80,230],[210,210]);
line([80,230],[60,60]);
line([230,230],[60,210]);
px = 69.80452;
py = 211.9779;
px2 =77.74917;
py2 =220.1387;
line([0,px],[0,py]);
line([px2,300],[py2,300]);
%求距离
pdist([[0,0];[px,py]],'euclidean')
pdist([[300,300];[px2,py2]],'euclidean')
%求弧度
%圆心角
d=sqrt((px-px2)^2+(py-py2)^2);
therta=2*asin(d/(2*r));
%弧长
L=r*therta;
%直线总距离
L2 = pdist([[0,0];[px,py]],'euclidean') + pdist([[300,300];[px2,py2]],'euclidean');
v0 = 5;
vp = v0/(1+(exp(1)^(10-0.1*r*r)));
ans1 = L2/v0 + L/vp;
MATLAB数据算出来 , 验证成功
94.228254381074020










