基于ros的相机内参标定过程
- 1. 安装还对应相机的驱动
- 2. 启动相机节点发布主题
- 3. 下载camera_calibartion
- 4. 将红框的文件夹复制在自己的工作空间里边,编译
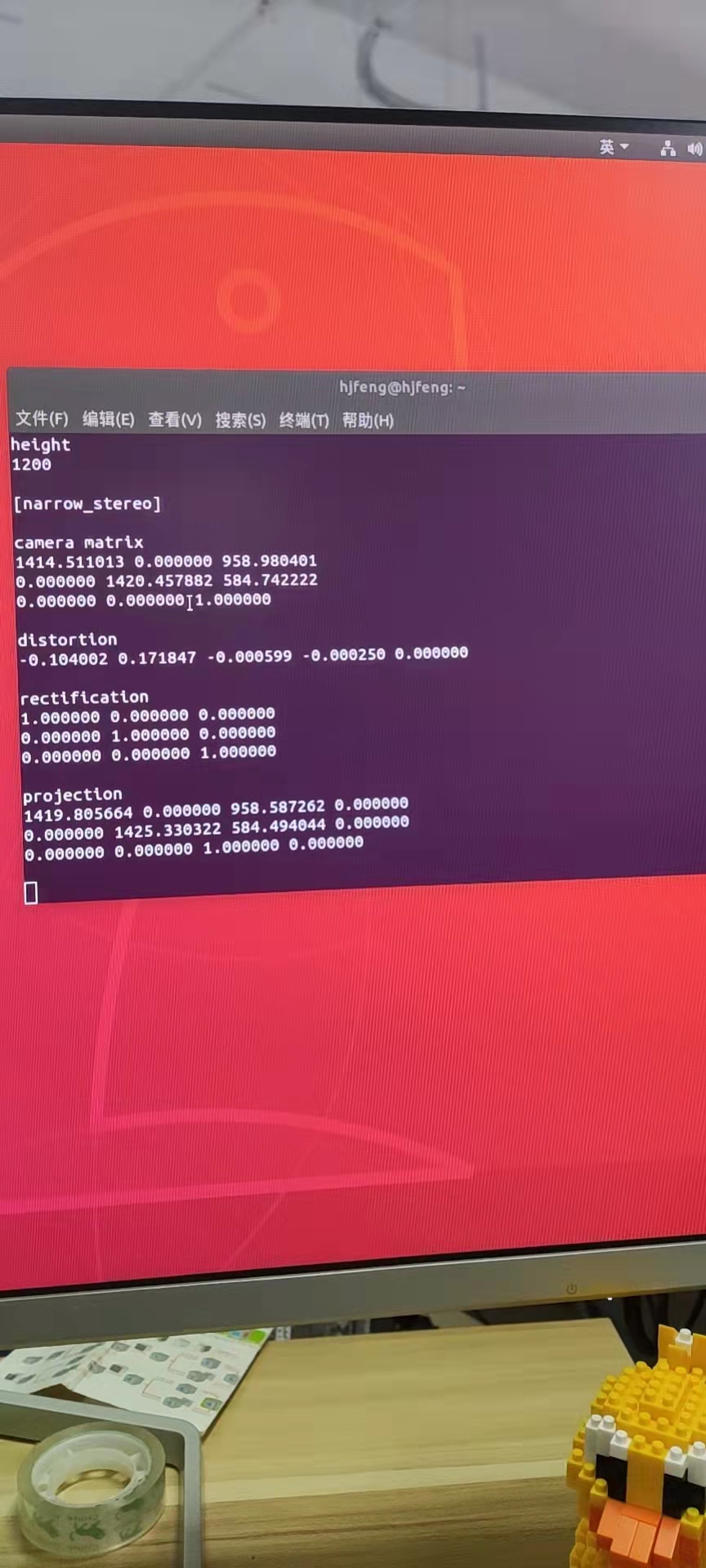
- 5. 标定完成以后,生成内参参数文件camera.yaml。将文件放在对应的路径下,修改config文件中标定参数的默认路径。在下次打开相机节点的时候就会加载;
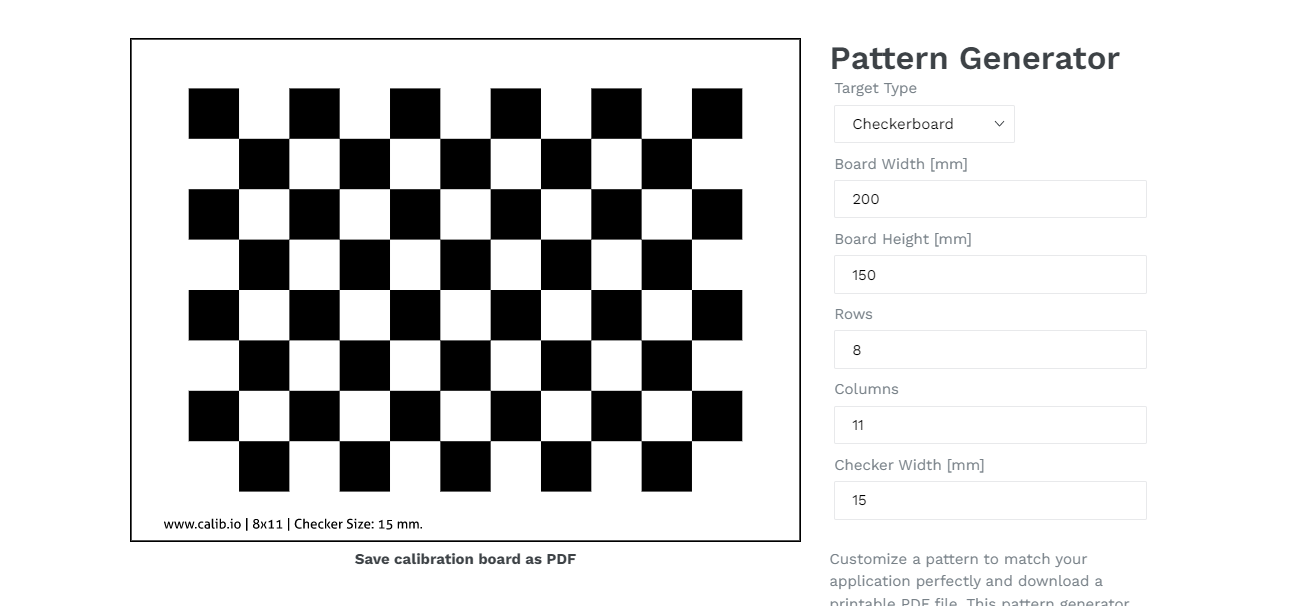
- 6. 生成标定棋盘的网址,可以设置方格数和方格大小
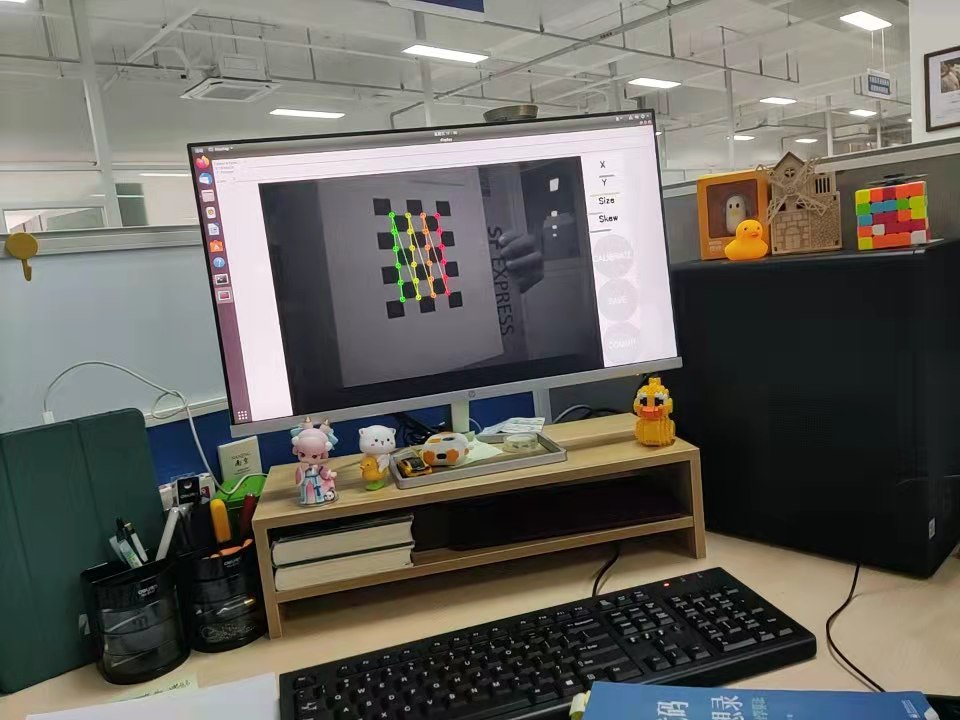
- 7. 标定结果
本篇文章用于记录基于ROS系统的balser相机的内参标定流程,使用的是balser 1920-40gc相机和computar-C镜头。
相机帧率42fps, 分辨率2.3MP, 感光芯片IMX249, 镜头焦距8mm
主要是记录一些资料的链接。比如标定棋盘格的网站,以及内参标定工具箱的ROS节点地址,基于UBUNTU1804,ROS melodic
1. 安装还对应相机的驱动
2. 启动相机节点发布主题
3. 下载camera_calibartion
下载链接https://github.com/ros-perception/image_pipeline
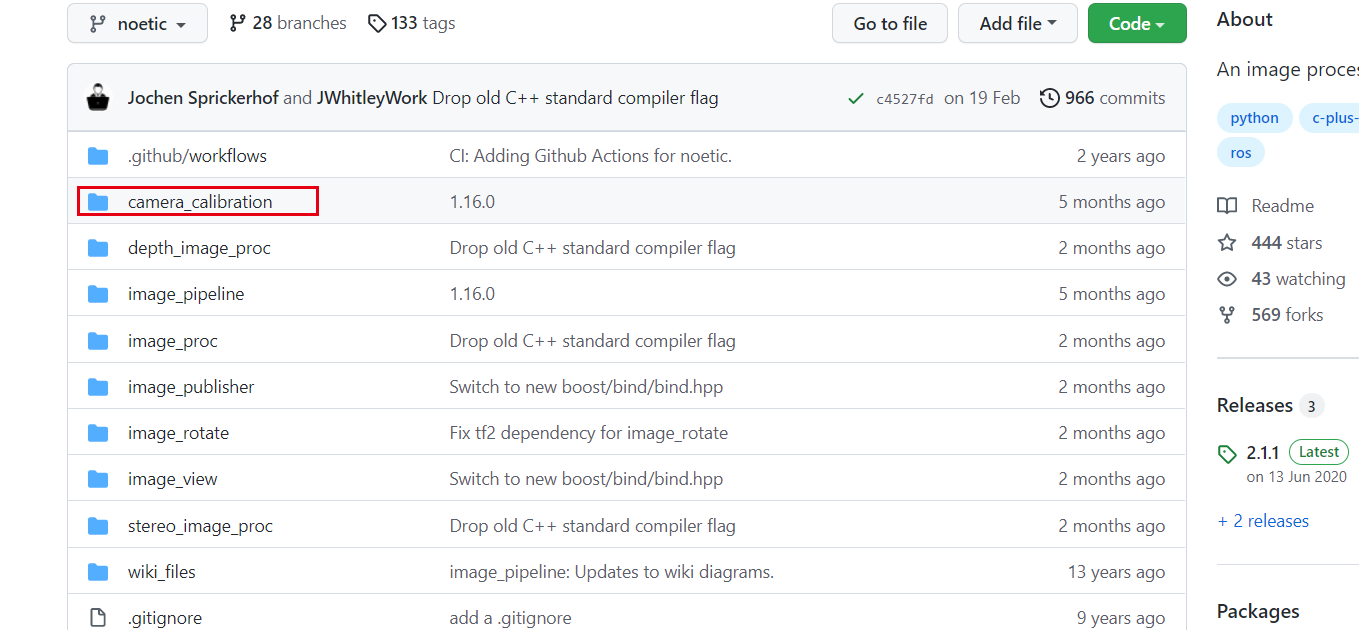
4. 将红框的文件夹复制在自己的工作空间里边,编译
- 详细标定步骤请参考
https://blog.csdn.net/qq_41746268/article/details/84752914
5. 标定完成以后,生成内参参数文件camera.yaml。将文件放在对应的路径下,修改config文件中标定参数的默认路径。在下次打开相机节点的时候就会加载;
参考链接
https://docs.ros.org/en/api/camera_info_manager/html/classcamera__info__manager_1_1CameraInfoManager.html
6. 生成标定棋盘的网址,可以设置方格数和方格大小
https://calib.io/pages/camera-calibration-pattern-generator
7. 标定结果