文章目录
一、边缘检测算法概述
图像边缘检测是计算机视觉和图像处理中的重要任务,它用于检测图像中物体和区域之间的边缘和轮廓。在Python中,有多种方法可以进行图像边缘检测,本文将介绍一种常用的方法:Canny边缘检测算法。
二、常用边缘检测算法
2.1、Sobel算法
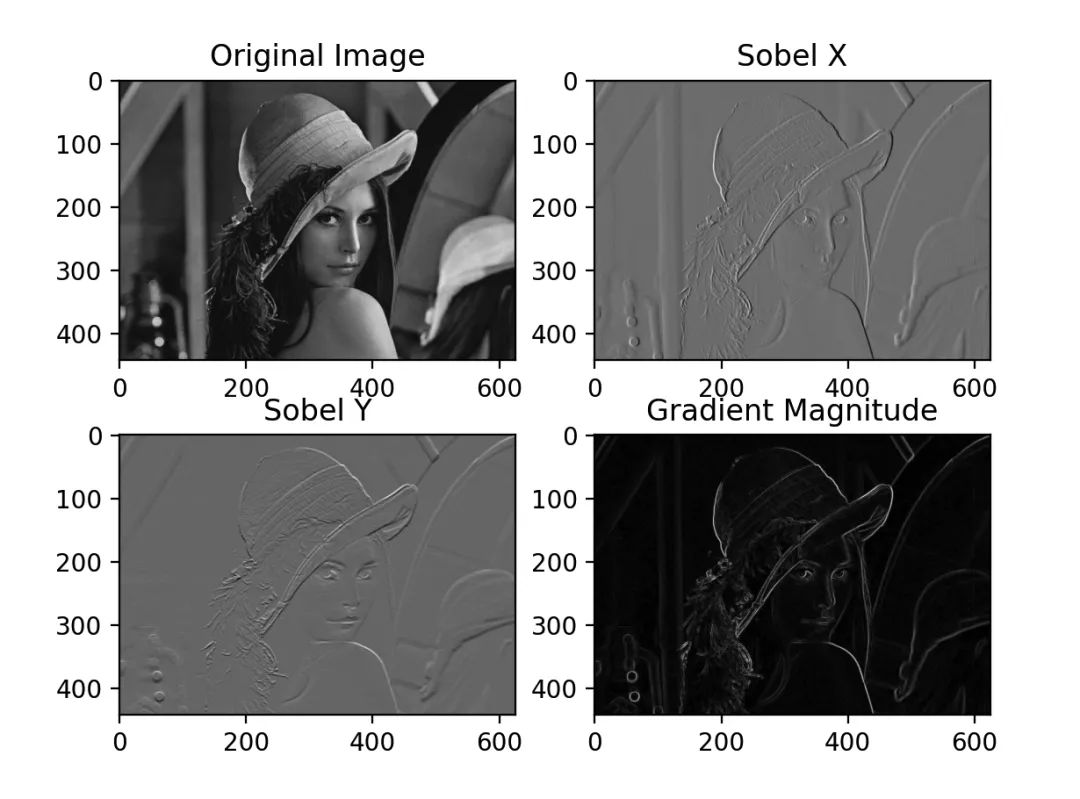
Sobel算法是一种基于卷积的边缘检测方法,通过计算图像的梯度来检测边缘。它使用两个卷积核,一个用于水平方向,另一个用于垂直方向。
对于水平方向的Sobel核:
对于垂直方向的Sobel核:
最终梯度图像:
代码案例
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取图像
img = cv2.imread("lenna.jpg", cv2.IMREAD_GRAYSCALE)
# Sobel滤波
sobel_x = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3)
sobel_y = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=3)
# 计算梯度幅值
gradient_magnitude = np.sqrt(sobel_x**2 + sobel_y**2)
# 绘制图像
plt.subplot(2, 2, 1), plt.imshow(img, cmap='gray'), plt.title('Original Image')
plt.subplot(2, 2, 2), plt.imshow(sobel_x, cmap='gray'), plt.title('Sobel X')
plt.subplot(2, 2, 3), plt.imshow(sobel_y, cmap='gray'), plt.title('Sobel Y')
plt.subplot(2, 2, 4), plt.imshow(gradient_magnitude, cmap='gray'), plt.title('Gradient Magnitude')
plt.show()
2.2、Prewitt算法
Prewitt算法也是一种基于卷积的边缘检测方法,与Sobel类似,但使用不同的卷积核。
对于水平方向的Prewitt核:
对于垂直方向的Prewitt核:
最终梯度图像:
Python代码和图形
# 使用cv2.filter2D函数应用Prewitt卷积核
prewitt_x = cv2.filter2D(img, cv2.CV_64F, kernel=np.array([[-1, 0, 1], [-1, 0, 1], [-1, 0, 1]]))
prewitt_y = cv2.filter2D(img, cv2.CV_64F, kernel=np.array([[-1, -1, -1], [0, 0, 0], [1, 1, 1]]))
# 计算梯度幅值
gradient_magnitude_prewitt = np.sqrt(prewitt_x**2 + prewitt_y**2)
# 绘制图像
plt.subplot(2, 2, 1), plt.imshow(img, cmap='gray'), plt.title('Original Image')
plt.subplot(2, 2, 2), plt.imshow(prewitt_x, cmap='gray'), plt.title('Prewitt X')
plt.subplot(2, 2, 3), plt.imshow(prewitt_y, cmap='gray'), plt.title('Prewitt Y')
plt.subplot(2, 2, 4), plt.imshow(gradient_magnitude_prewitt, cmap='gray'), plt.title('Gradient Magnitude (Prewitt)')
plt.show()
2.3、Canny算法
原理:
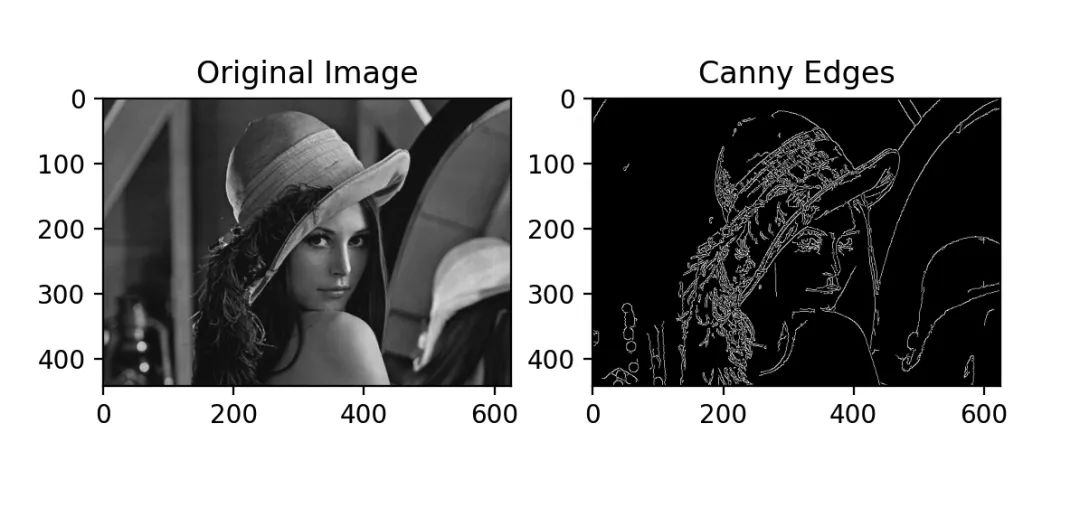
Canny算法是一种多阶段的边缘检测算法,包括高斯滤波、梯度计算、非极大值抑制、双阈值边缘跟踪等步骤。
核心公式:
- 高斯滤波:
- 梯度计算:
- 非极大值抑制: 在梯度方向上,只保留局部最大值。
- 双阈值边缘跟踪: 利用高阈值和低阈值对图像进行分割,形成强边缘和弱边缘。
Python代码和图形:
# Canny边缘检测
canny_edges = cv2.Canny(img, 50, 150)
# 绘制图像
plt.subplot(1, 2, 1), plt.imshow(img, cmap='gray'), plt.title('Original Image')
plt.subplot(1, 2, 2), plt.imshow(canny_edges, cmap='gray'), plt.title('Canny Edges')
plt.show()
Canny边缘检测算法是一种经典的边缘检测算法,它由John F. Canny于1986年提出,被广泛应用于计算机视觉领域。该算法具有以下步骤:
高斯滤波:由于图像中的噪声可能会影响边缘检测的结果,因此首先需要对图像进行高斯滤波来平滑图像并去除噪声。可以使用OpenCV库中的**cv2.GaussianBlur()**函数来实现高斯滤波。
import cv2
# 读取图像
image = cv2.imread('image.jpg', 0)
# 高斯滤波
blurred = cv2.GaussianBlur(image, (5, 5), 0)
计算梯度:在平滑后的图像中,通过计算像素点的梯度来确定边缘。可以使用Sobel算子或Scharr算子来计算图像的梯度。
# 计算梯度
gradient_x = cv2.Sobel(blurred, cv2.CV_64F, 1, 0, ksize=3)
gradient_y = cv2.Sobel(blurred, cv2.CV_64F, 0, 1, ksize=3)
# 计算梯度幅值和方向
gradient_magnitude = cv2.magnitude(gradient_x, gradient_y)
gradient_direction = cv2.phase(gradient_x, gradient_y, angleInDegrees=True)
非极大值抑制:在计算梯度幅值和方向之后,需要对图像进行非极大值抑制,以保留具有最大梯度幅值的边缘。这一步的目的是细化和提取真实的边缘线条。
# 非极大值抑制
edges = cv2.Canny(blurred, threshold1, threshold2)
双阈值检测:通过设置双阈值来确定强边缘和弱边缘,并进一步筛选和连接边缘。
# 双阈值检测
threshold1 = 100
threshold2 = 200
edges = cv2.Canny(blurred, threshold1, threshold2)
阈值的选择对于边缘检测的效果非常重要,可以根据具体图片和应用场景进行调整。
边缘连接:在双阈值检测之后,还需要进行边缘连接,将弱边缘与强边缘进行连接,形成完整的边缘线。
# 边缘连接
edges = cv2.dilate(edges, None)
示例代码
下面是一个完整的示例代码,用于演示如何使用Python和OpenCV进行Canny边缘检测:
import cv2
# 读取图像
image = cv2.imread('image.jpg', 0)
# 高斯滤波
blurred = cv2.GaussianBlur(image, (5, 5), 0)
# 计算梯度
gradient_x = cv2.Sobel(blurred, cv2.CV_64F, 1, 0, ksize=3)
gradient_y = cv2.Sobel(blurred, cv2.CV_64F, 0, 1, ksize=3)
# 计算梯度幅值和方向
gradient_magnitude = cv2.magnitude(gradient_x, gradient_y)
gradient_direction = cv2.phase(gradient_x, gradient_y, angleInDegrees=True)
# 非极大值抑制
edges = cv2.Canny(blurred, threshold1, threshold2)
# 边缘连接
edges = cv2.dilate(edges, None)
# 显示图像和边缘
cv2.imshow('Original Image', image)
cv2.imshow('Canny Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
通过以上代码,我们可以加载一张图像,并对其应用Canny边缘检测算法,最终显示原始图像和检测到的边缘。
以下是一个示例代码,展示了如何使用Canny边缘检测算法来检测交通标志的轮廓。
import cv2
# 读取图像
image = cv2.imread('traffic_sign.jpg')
# 将图像转换为灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 高斯滤波
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
# 计算梯度
gradient_x = cv2.Sobel(blurred, cv2.CV_64F, 1, 0, ksize=3)
gradient_y = cv2.Sobel(blurred, cv2.CV_64F, 0, 1, ksize=3)
# 计算梯度幅值和方向
gradient_magnitude = cv2.magnitude(gradient_x, gradient_y)
gradient_direction = cv2.phase(gradient_x, gradient_y, angleInDegrees=True)
# 非极大值抑制
edges = cv2.Canny(blurred, threshold1, threshold2)
# 边缘连接
edges = cv2.dilate(edges, None)
# 检测轮廓
contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 绘制轮廓
cv2.drawContours(image, contours, -1, (0, 255, 0), 2)
# 显示图像和边缘检测结果
cv2.imshow('Original Image', image)
cv2.imshow('Canny Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
以上代码中,我们首先读取一张包含交通标志的图像,并将其转换为灰度图像。然后,我们应用高斯滤波和Canny边缘检测算法来提取图像的边缘。接下来,我们使用轮廓检测函数
**cv2.findContours()**找到边缘的轮廓,并将其绘制到原始图像上。最后,我们显示原始图像和边缘检测结果。这个示例代码可以用于交通标志识别系统中,帮助检测和定位交通标志的位置。
**cv2.GaussianBlur()**是OpenCV图像处理库中用于进行高斯模糊的函数之一。高斯模糊是一种常用的图像平滑技术,它可以减少图像中的噪声和细节,使图像在一定程度上变得模糊。 该函数的语法如下:
dst = cv2.GaussianBlur(src, ksize, sigmaX[, dst[, sigmaY[, borderType]]])
参数说明:
- src: 输入图像。可以是单通道或多通道图像,深度应为CV_8U、CV_16U、CV_16S、CV_32F或CV_64F之一。
- ksize: 高斯核大小。可以是一个整数,表示正方形核的边长,或者是一个(height, width)的元组表示矩形核的尺寸。尺寸必须是正奇数。
- sigmaX: X方向上的高斯核标准差。如果为0,则根据ksize自动计算。
- dst: 输出图像。与输入图像具有相同的大小和类型。
- sigmaY: Y方向上的高斯核标准差。如果为0,则与sigmaX相同。
- borderType: 边界模式。默认为cv2.BORDER_DEFAULT。 实现高斯模糊的具体步骤如下:
- 计算高斯核。高斯核是一个二维高斯分布函数在图像上的离散近似。高斯核的大小和标准差决定了模糊的程度。
- 在处理图像的每个像素时,将该像素和其周围像素按照高斯核进行加权平均。权重取决于两个像素之间的距离和高斯分布函数的值。
- 对于图像边缘的像素,在计算加权平均时,根据指定的边界类型来处理边界像素。 返回的结果是经过高斯模糊处理后的图像。通过调整ksize和sigmaX参数,可以控制模糊的程度和效果。 简单示例代码如下:
import cv2
# 读取图像
image = cv2.imread('input.jpg')
# 高斯模糊
blurred = cv2.GaussianBlur(image, (5, 5), 0)
# 显示原始图像和模糊后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Blurred Image', blurred)
cv2.waitKey(0)
cv2.destroyAllWindows()
在示例中,我们读取了一张图像,并使用**cv2.GaussianBlur()**函数对其进行了高斯模糊处理。通过调整模糊核的大小和标准差,可以获得不同程度的模糊效果。
三、总结
Sobel和Prewitt是基于卷积的边缘检测算法,通过计算图像梯度来寻找边缘。Canny算法是一种多阶段的边缘检测方法,包括高斯滤波、梯度计算、非极大值抑制和双阈值边缘跟踪。每种算法都有其特定的核心公式和实现步骤,用于检测图像中的边缘。在实际应用中,根据具体需求和图像特点选择合适的边缘检测算法。










