文章目录
前言
串口是我们在调试中常常需要的一环,它可以帮助我们实时打印信息,其基础知识在之前的学习笔记中已经提到了,感兴趣或者用什么问题可以回顾一下,这部分主要解释Linux下的TTY体系。TTY设备不仅支持UART(通用异步收发传输器)通信,还支持键盘输入、显示器输出以及更复杂的功能,如伪终端。
一、TTY体系
1. 什么是TTY
TTY体系在Linux系统中指的是一种终端设备体系,它提供了用户与操作系统之间的交互界面。TTY一词源于Teleprinter(电传打印机),在早期的计算机系统中,TTY是以打字机作为输入输出设备的终端系统。而在现代的Linux系统中,TTY则对应着虚拟终端。
TTY体系主要由多个虚拟终端组成,每个虚拟终端都对应着一个TTY设备文件。这些设备文件位于/dev目录下,以tty开头,后面跟随一个数字,如tty1、tty2等。用户可以通过TTY设备读取输入的字符,并将输出字符发送到TTY设备,这些字符可以是用户输入的命令、系统的输出信息等。
在Linux系统中,TTY终端设备主要分为三种类型:串口终端(/dev/ttyS*)、虚拟终端(/dev/tty*)和控制台终端(/dev/console)。串口终端是使用计算机串口连接的终端设备;虚拟终端则是用户登录时使用的终端,用户可以通过Ctrl+Alt+[F1-F6]组合键切换到不同的虚拟终端;控制台终端则包括系统控制台、当前控制台和虚拟控制台。
2. TTY中各设备节点的差别
- 设备类型与用途:
/dev/ttyS0:通常代表PC的串口,用于串行通信,连接外部设备如调制解调器或其他串口设备。
/dev/tty:表示当前程序所在的终端,可能是虚拟终端,也可能是真实的终端。它代表了一个通用的终端接口,不特定于某个具体的串口或虚拟终端。
/dev/tty0:通常表示前台程序的虚拟终端,即用户当前正在操作的界面。
/dev/tty1, /dev/tty2, … /dev/ttyn:表示不同的虚拟终端。用户可以在这些虚拟终端之间切换,每个虚拟终端都可以独立运行程序。 - 访问与交互:
-当一个程序在后台运行时,如果它尝试访问/dev/tty0,它实际上是在访问前台程序的终端。这意味着后台程序可以与前台程序的终端进行交互。
-当前程序无论在前台还是后台切换,其自己的/dev/tty都不会改变,这保证了程序与其终端的稳定连接。
3.Terminal和Console
Terminal我们常常指终端,而Console为控制台,这表明他有更大的权限和查看更多的信息,例如内核信息等。从某种角度来说,console可能是任何一个terminal,但不是所有terminal都是console。虽然在日常的使用中我们常常会混淆二者的定义,但Terminal和Console在定义、功能、物理与虚拟特性以及交互方式上存在明显的差别。
- 定义与功能:
Terminal:它是用户与计算机系统交互的界面,特别是图形用户界面(GUI)环境下的模拟终端仿真器。终端仿真器提供了一个命令行界面(CLI),用户可以通过输入命令和参数与操作系统进行交互。常见的终端仿真器包括GNOME Terminal、KDE Konsole、xterm等。终端的本质在于它能接受输入并显示输出,是处理计算机主机输入输出的设备,典型的终端包括显示器键盘套件、打印机打字机套件等。
Console:它通常指的是连接到计算机系统的物理设备,如键盘和显示器。在Linux系统中,控制台提供了一个字符终端界面,用户可以直接在控制台上输入命令和查看输出。控制台在计算机程序中用于输入和输出文本或命令,提供了一个命令行界面或命令行提示符,允许用户通过键盘输入命令,并显示程序的输出结果。 - 物理与虚拟特性:
Terminal:可以是物理的,也可以是虚拟的。物理终端直接连接在主机上,包括显示器、键盘鼠标等。虚拟终端则通过软件模拟实现,例如使用TCP/IP承载的远程终端(如Telnet和SSH)。
Console:通常指的是物理设备,特别是当提及Linux系统的控制台时,它指的是连接到计算机系统的物理键盘和显示器。尽管有些程序可以模拟终端设备的功能,被称为控制台软件,但从本质上讲,控制台更多地与物理设备相关联。 - 交互方式:
Terminal:提供了多种交互方式,包括本地终端和远程终端。本地终端通过VGA、PS/2或USB等接口连接主机和显示器/键盘。远程终端则通过网络连接,如Telnet和SSH,允许用户远程访问和操作计算机系统。
Console:通常是一个文本界面,提供了命令行界面或命令行提示符,用户通过键盘输入命令并与操作系统进行交互。控制台通常以黑色背景和白色或其他亮色的文本显示,以便用户清晰地看到输入和输出。
在实际使用中,我们可以使用:Console=/dev/XXX (XXX指前面提到了各个设备节点)来指定哪一个终端作为本次的控制台从而获得更高权限,此外若存在多个Console的值,会自动取最后一次的赋值。
二、TTY驱动框架
Linux tty子系统包含通常包含tty核心、tty行规程和tty驱动。
① tty核心是对整个tty设备的抽象,对用户提供统一的接口。
② tty行规程用于处理控制字符、回显输入数据、缓存输入数据、显示数据输出等。行规程可以根据应用层的需求进行设置,如果应用层不需要这些处理机制,可以将其设置为原始模式。
③ tty驱动则是面向tty设备的硬件驱动。
在TTY驱动框架中,数据的传输过程是一个涉及多个层次和组件的复杂过程。首先,我们假设一个应用程序需要与串口设备进行通信。那么他的处理流程大体如下所示:
打开设备文件:应用程序首先通过系统调用(如open)打开与串口设备对应的设备文件,例如/dev/ttyS0(对于第一个串口设备)。这个操作会触发TTY驱动框架的相应处理,将应用程序与特定的TTY设备关联起来。
配置串口参数:接下来,应用程序可能会调用如termios或类似的API来配置串口的参数,如波特率、数据位、停止位和校验位等。这些配置参数会传递给TTY驱动框架,以确保数据的正确传输。
发送数据:一旦串口配置完成,应用程序就可以通过write系统调用向串口发送数据。这些数据首先被写入到TTY驱动框架的发送缓冲区中。然后,TTY驱动框架会按照配置好的串口参数,将数据格式化并发送到实际的串口硬件。在发送过程中,TTY驱动框架会处理如奇偶校验、停止位等细节。
接收数据:当串口接收到数据时,TTY驱动框架会读取这些数据,并将其放入接收缓冲区中。然后,它会检查数据的完整性(例如,是否包含正确的奇偶校验位)。如果数据完整无误,TTY驱动框架会通过中断或其他机制通知应用程序有数据可读。应用程序随后可以通过read系统调用从接收缓冲区中读取数据。
错误处理:在整个传输过程中,TTY驱动框架还会处理可能出现的错误情况,如串口通信中断、硬件故障等。当发生错误时,TTY驱动框架会采取相应的措施,如通知应用程序、重试发送或关闭串口等。
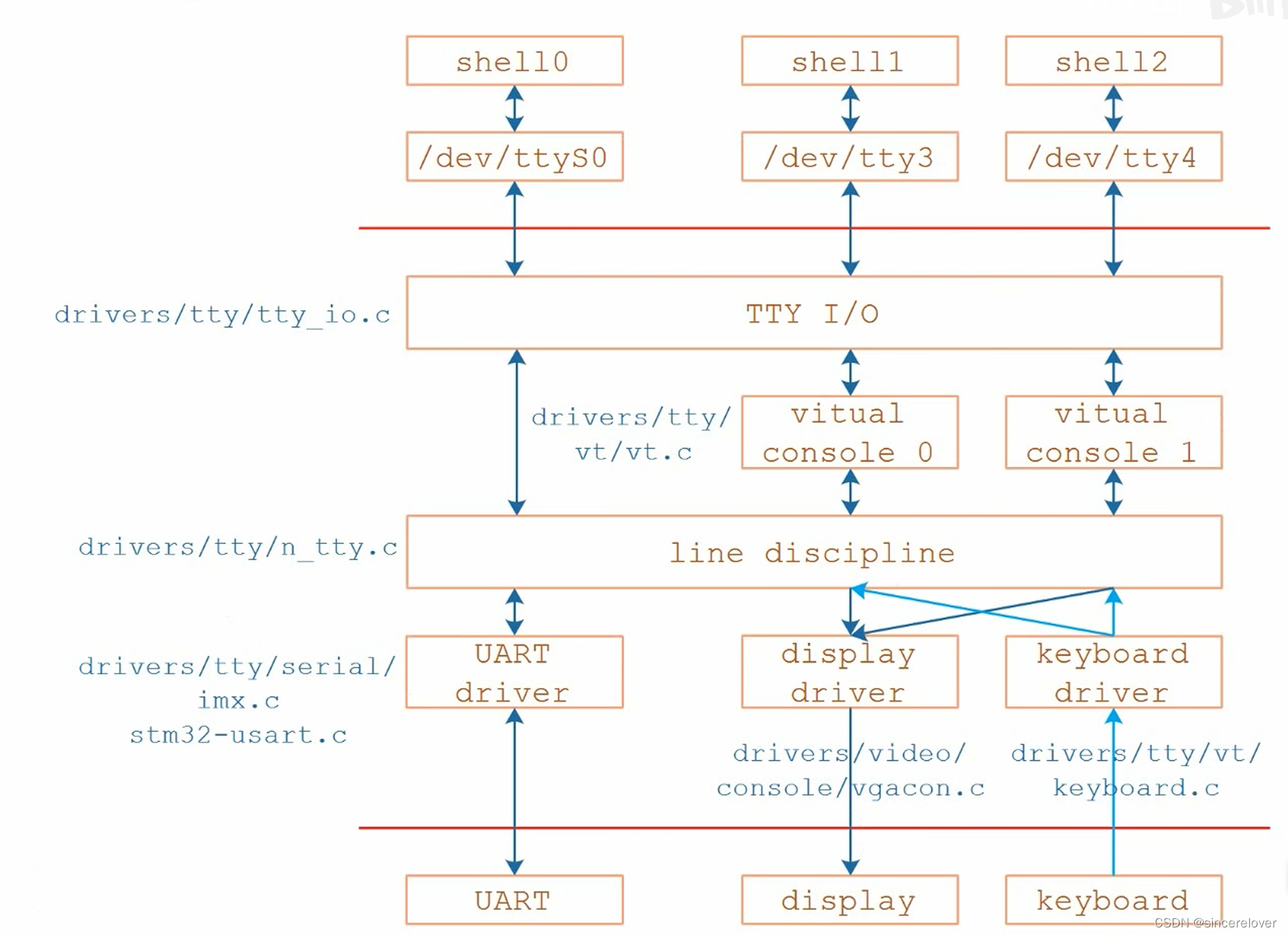
我们可以看出信息流的方向,是一个纵向的通路,一端是计算机程序,另一端是某种硬件。以打印一个字符“A”为例,从keyboard输入,tty的驱动层收到的数据通过 tty 驱动向上回流,先进入 tty 行规程,当检测到这是一个普通的字符时,直接返回到驱动层从而下发到指定的tty硬件设备上进行回显。如果将行规程设置为原始模式,则回在进过行规程判别后再进入tty核心, 最后被用户获取。
三、串口调试
本次实验依旧是基于泰山派(RK3566),其引脚分布如下图所示:

测试串口我们需要一个串口调试工具,我这里借用的是32开发板的串口模块CH340,当然也可以直接接这样一个模块。通过上面的引脚定义中我们可以知道用户GPIO中的8、9脚对应UART3,这里我们通过杜邦线把UART3_TX_M1连接到CH340的RXD引脚,UART3_RX_M1连接到CH340的TXD引脚,并且进行共地,连接如下表所示。
| GPIO | 引脚功能 | CH340 |
|---|---|---|
| GPIO3_B7 | UART3_TX | RXD |
| GPIO3_C0 | UART3_RX | TXD |
| GND | GND |
其调试流程大致如下:
//无权限请使用sudo进入root权限
stty -F /dev/ttyS3
之后会显示串口信息,包括波特率等。
//更改波特率 ispeed:输入波特率 ospeed:输出波特率
stty -F /dev/ttyS3 ispeed 115200 ospeed 115200
进行串口输出。
//向串口3输出hello
echo "hello" > /dev/ttyS3
这里作者全程是在root用户下进行的,如果无法执行可以先赋权限
sudo chmod 777 /dev/ttyS3
四、驱动编写
在结束前面的准备工作之后,我们就要开始进行最喜闻乐见的环节了。对于uart编程来说,大体分为三个部分:open→设置行规程→write/read。
首先我们需要了解一下termios,它包含uart所需要的一些基本参数:
//注:这里参数的取值可选项有很多,笔者不在这里赘述了,如果大家感兴趣的可以去自行查阅
struct termios {
tcflag_t c_iflag; /* 输入模式标志位 */
tcflag_t c_oflag; /* 输出模式标志位 */
tcflag_t c_cflag; /* 控制模式标志位 */
tcflag_t c_lflag; /* 本地模式标志位 */
cc_t c_cc[NCCS]; /* 控制字符数组 */
cc_t c_line; /* 线路规程 */
speed_t c_ispeed; /* 输入波特率 */
speed_t c_ospeed; /* 输出波特率 */
};
接下来我们进行实际操作,先打开串口:
int open_port(char *com)
{
int fd;
//O_NOCTTY -------- 打开的串口不作为控制终端
fd = open(com, O_RDWR|O_NOCTTY);
if (-1 == fd){
return(-1);
}
if(fcntl(fd, F_SETFL, 0)<0) /* 设置串口为阻塞状态*/
{
printf("fcntl failed!\n");
return -1;
}
return fd;
}
在打开串口之后,我们常常使用tcgetattr( )函数得到当前串口的参数,以此来检测到是否链接成功。
#include <termios.h>
#include <unistd.h>
//检测当前串口参数,并保存在第二个参数中,通常获取串口需要对原始信息进行备份,在程序退出前需要修改回来
int tcgetattr(int fd, struct termios *termios_p);
此外,我们还需要一个tcsetattr( )函数用来设置终端参数
#include <termios.h>
#include <unistd.h>
//设置终端参数
int tcgetattr(int fd, int optional_actions, const struct termios *termios_p);
-
参数
- int fd: 要设置属性的文件描述符
- int optional_actions: 设置属性时,可以控制属性生效的时刻,optional_actions可以取下面几个值:
- TCSANOW: 立即生效
- TCADRAIN: 改变在所有写入fd 的输出参数都被传输后生效,这个函数应当用于修改影响输出的参数时使用
- TCSAFLUSH :改变在所有写入fd 引用的对象的输出都被传输后生效,所有已接受但未读入的输入都在改变发生前丢弃(同 TCSADRAIN,但会舍弃当前所有值)
- *termios termios_p: 用来设置的串口属性的结构体指针,对串口的termios配置好后,传入函数即可。
-
返回值:成功返回0,失败返回-1。
接下来就就是完整的端口设置(初始化)程序了:
int set_opt(int fd,int nSpeed, int nBits, char nEvent, int nStop)
{
struct termios newtio,oldtio;
if ( tcgetattr( fd,&oldtio) != 0) {
perror("SetupSerial 1");
return -1;
}
bzero( &newtio, sizeof( newtio ) );
newtio.c_cflag |= CLOCAL | CREAD;
newtio.c_cflag &= ~CSIZE;
newtio.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG); /*Input*/
newtio.c_oflag &= ~OPOST; /*Output*/
//选择传输位数
switch( nBits )
{
case 7:
newtio.c_cflag |= CS7;
break;
case 8:
newtio.c_cflag |= CS8;
break;
}
//选择校验位
switch( nEvent )
{
case 'O':
newtio.c_cflag |= PARENB;
newtio.c_cflag |= PARODD;
newtio.c_iflag |= (INPCK | ISTRIP);
break;
case 'E':
newtio.c_iflag |= (INPCK | ISTRIP);
newtio.c_cflag |= PARENB;
newtio.c_cflag &= ~PARODD;
break;
case 'N':
newtio.c_cflag &= ~PARENB;
break;
}
//选择传输速率
switch( nSpeed )
{
case 2400:
cfsetispeed(&newtio, B2400);
cfsetospeed(&newtio, B2400);
break;
case 4800:
cfsetispeed(&newtio, B4800);
cfsetospeed(&newtio, B4800);
break;
case 9600:
cfsetispeed(&newtio, B9600);
cfsetospeed(&newtio, B9600);
break;
case 115200:
cfsetispeed(&newtio, B115200);
cfsetospeed(&newtio, B115200);
break;
default:
cfsetispeed(&newtio, B9600);
cfsetospeed(&newtio, B9600);
break;
}
//选择停止位
if( nStop == 1 )
newtio.c_cflag &= ~CSTOPB;
else if ( nStop == 2 )
newtio.c_cflag |= CSTOPB;
//设置等待时间
newtio.c_cc[VMIN] = 1; // 读数据时的最小字节数: 没读到这些数据我就不返回!
newtio.c_cc[VTIME] = 0; // 等待第1个数据的时间
//设置阻塞模式
tcflush(fd,TCIFLUSH);
//使能配置生效
if((tcsetattr(fd,TCSANOW,&newtio))!=0)
{
perror("com set error");
return -1;
}
return 0;
}
注:本文部分参考了野火、韦东山和网上的公开资料,这里感谢各位的分享,若有侵权请联系笔者。










