
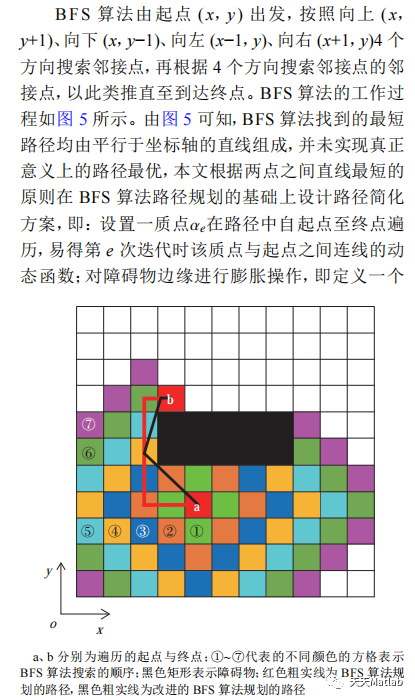
1 简介
2 部分代码
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%
% This function takes Obstacle edge coordinates, Workspace dimentions and
% generates a arena (Work Space) that is pre-processed for the allowed
% Coordinates. For each point in the Work Space dimentions, it checks
% wether it lies in Obstacle Space or in the Work Space.
%
% The obstacle space is determined using Half plane Method.
% We define equation of lines of each obstacle and use inequality to find
% weather the query point satiesfies all the inequalities or not. If it
% does then it lies inside or on the boundary of obstacle. If it is inside
% or on obstacle, it will be assigned a value of 1, otherwise 0.
% The result of this function is a Pre-Processed Work Space.
%
% Then the main Program will expland only the nodes with value 0.
%
% Code By: Mayank Pathak
%
%%%%
function [Arena] = ObstacleSpace_generator(Orectangle,Opolygon,Ocircle,Arena)
for i = 1:size(Arena,1) % iterate about x axis
for j = 1:size(Arena,2) % iterate about y axis
q_x = j;
q_y = i;
% Implementing inequality for rectangle
if (ge(q_x,Orectangle(1,1)) && le(q_x,Orectangle(1,3)) &&...
ge(q_y,Orectangle(2,1)) && le(q_y,Orectangle(2,3)))
Arena(i,j) = 1;
% Implementing inequality for Circle
elseif le(sqrt((q_x-Ocircle(1))^2 + (q_y-Ocircle(2))^2),15)
Arena(i,j) = 1;
end
% Implementing inequality for polygon
[In,On] = inpolygon(q_x,q_y,Opolygon(1,:),Opolygon(2,:));
if In || On
Arena(i,j) = 1;
end
end
end
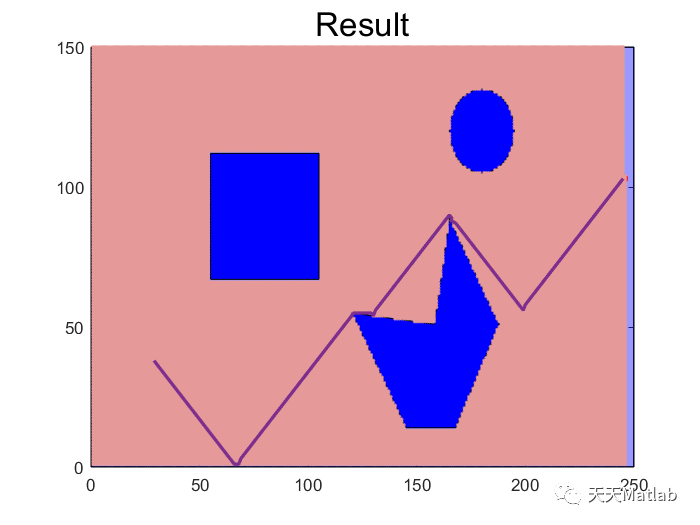
end3 仿真结果
4 参考文献
[1]金何. 基于BFS算法的三维动态环境下机器人路径规划[D]. 河南大学.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。
