
一、动力学模型
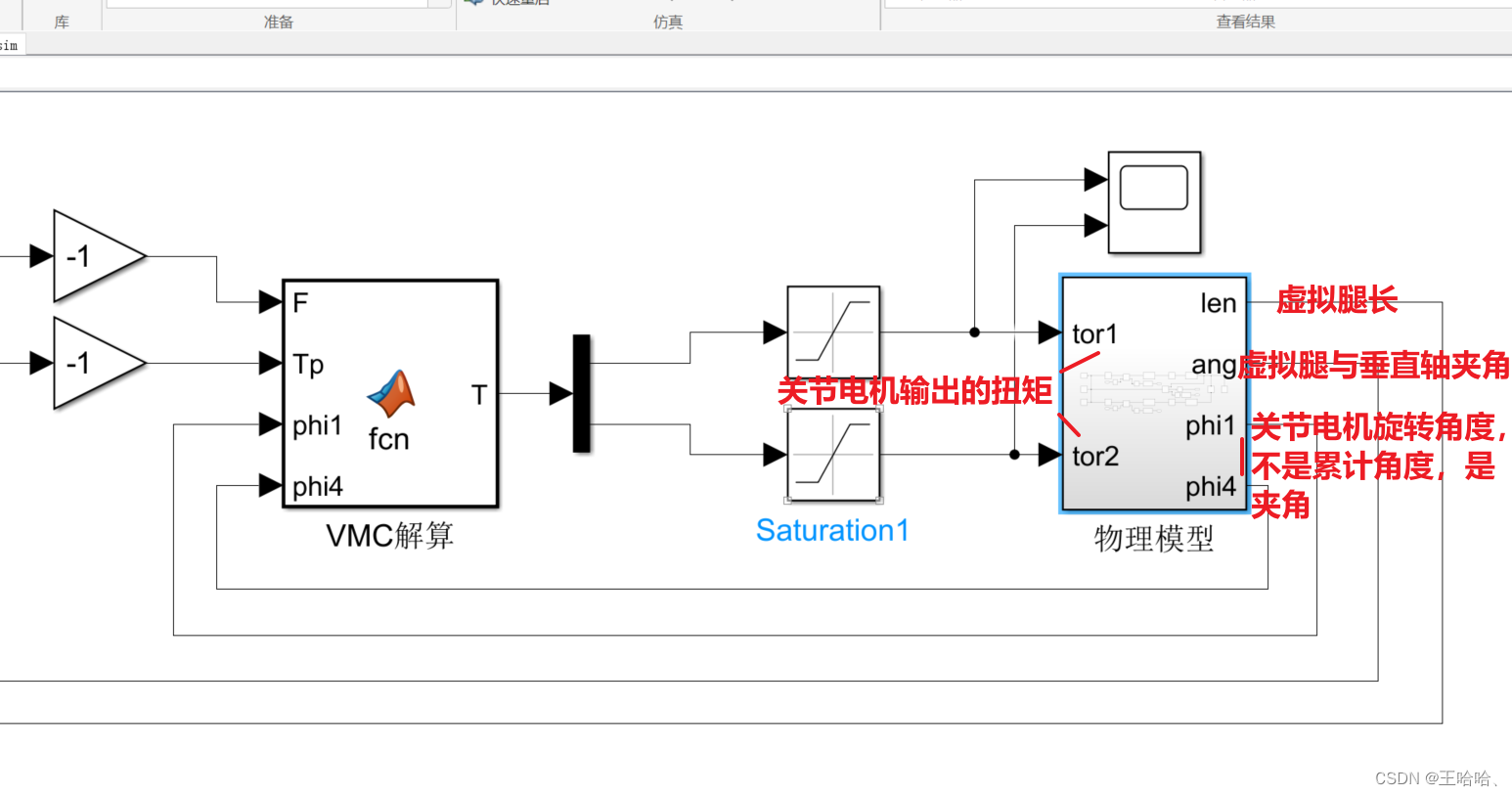
总系统引脚含义
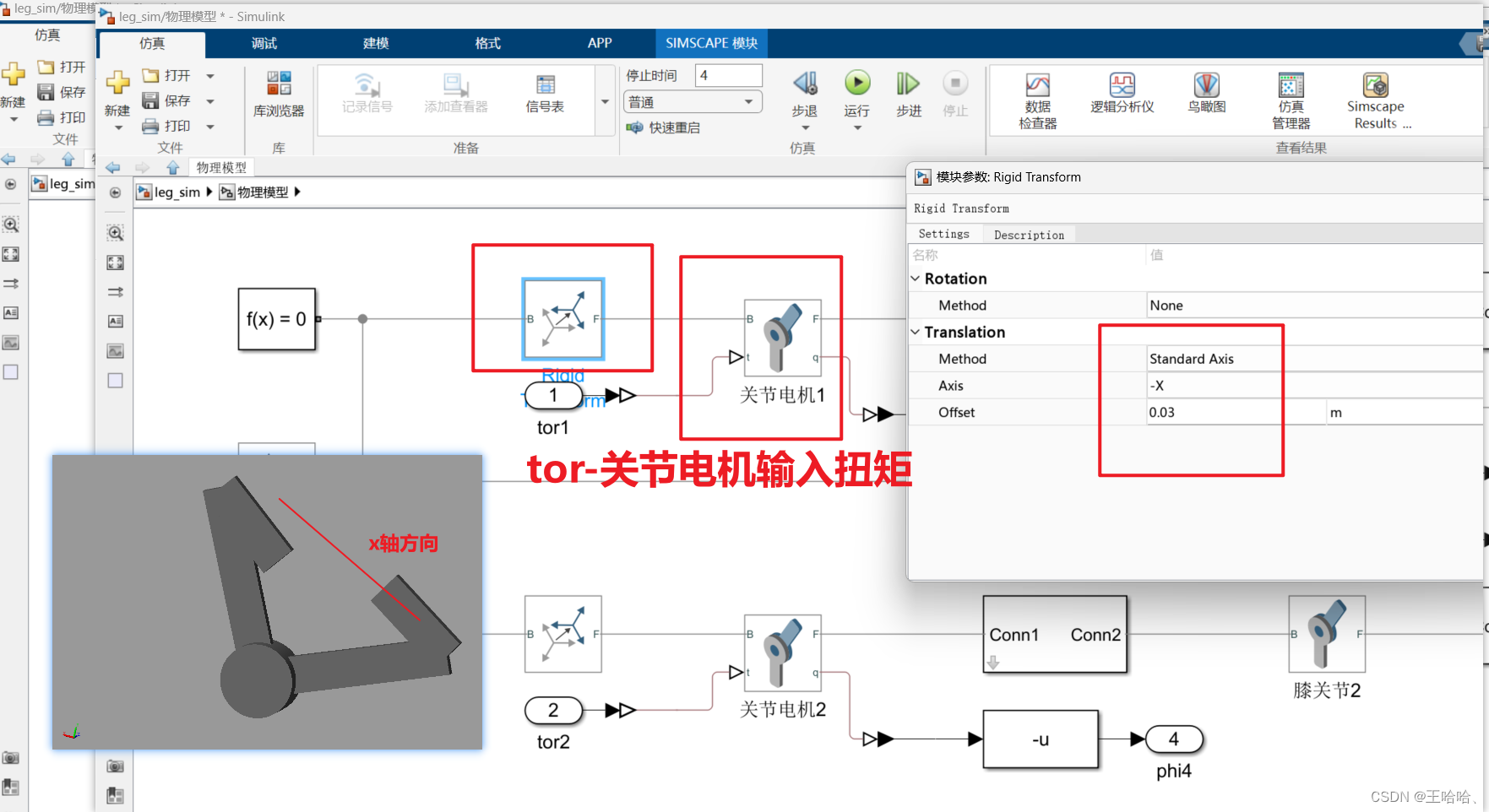
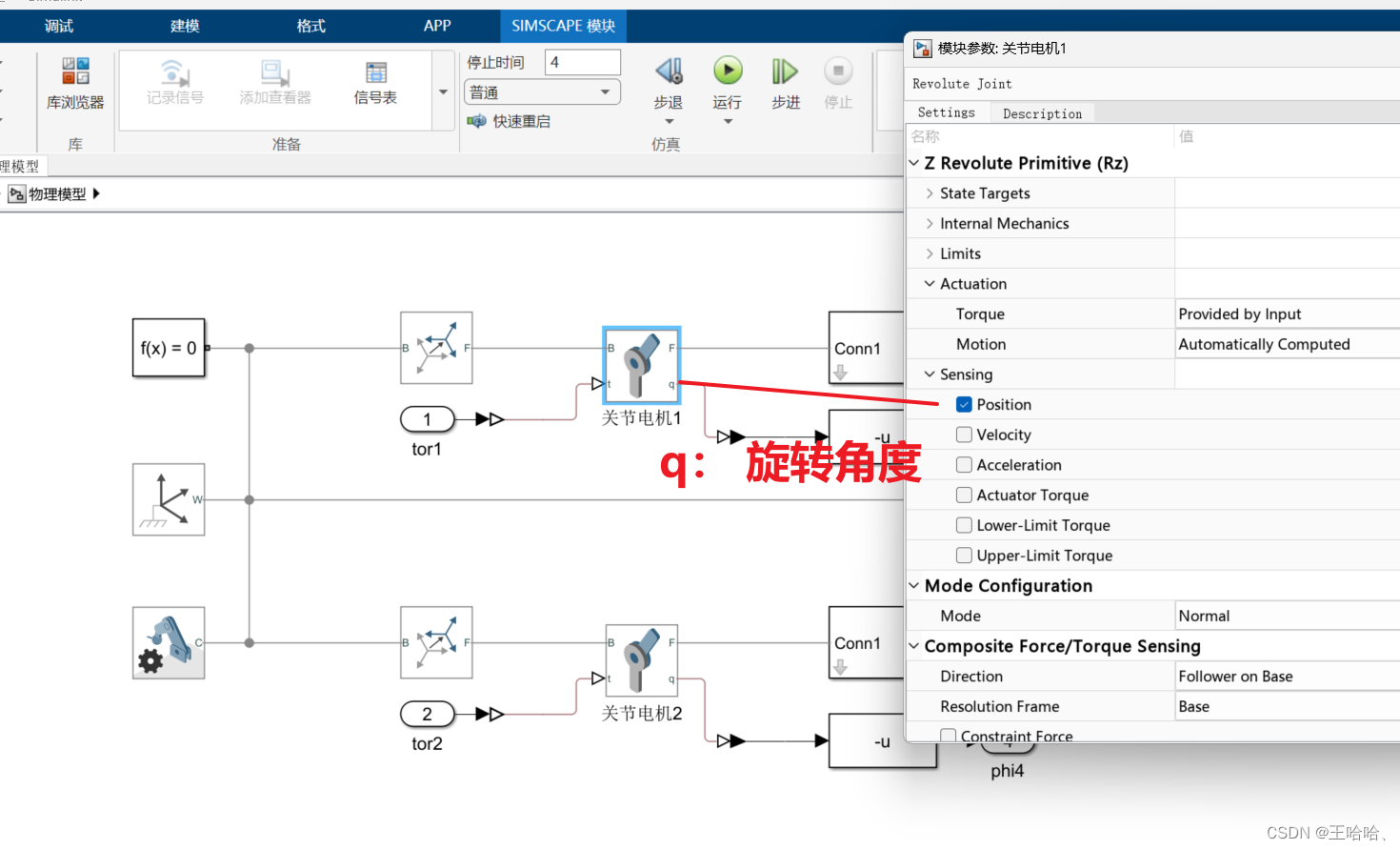
关节电机
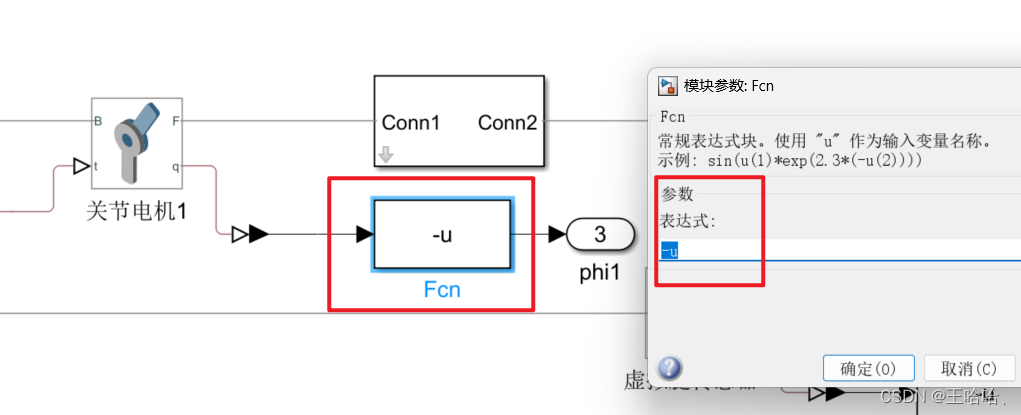
Fcn
搭建方程,输入与输入方程
phi1 = -q
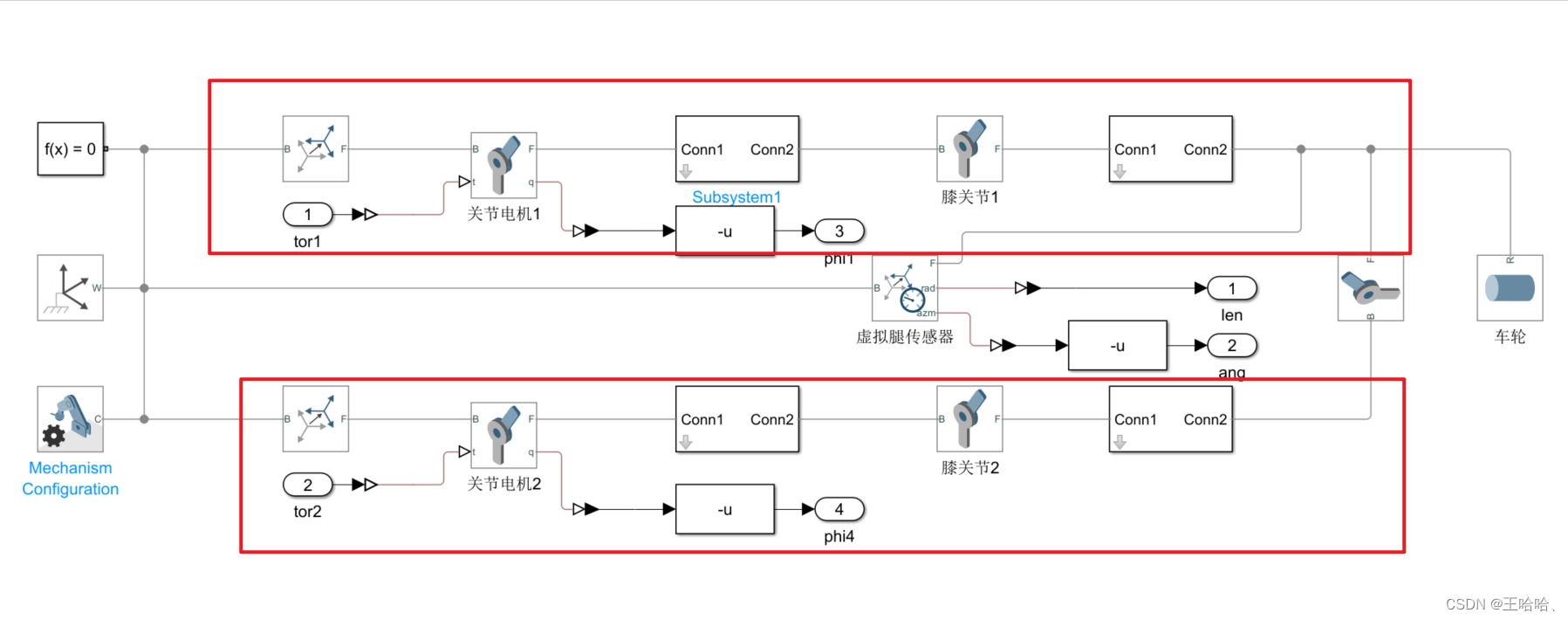
大腿
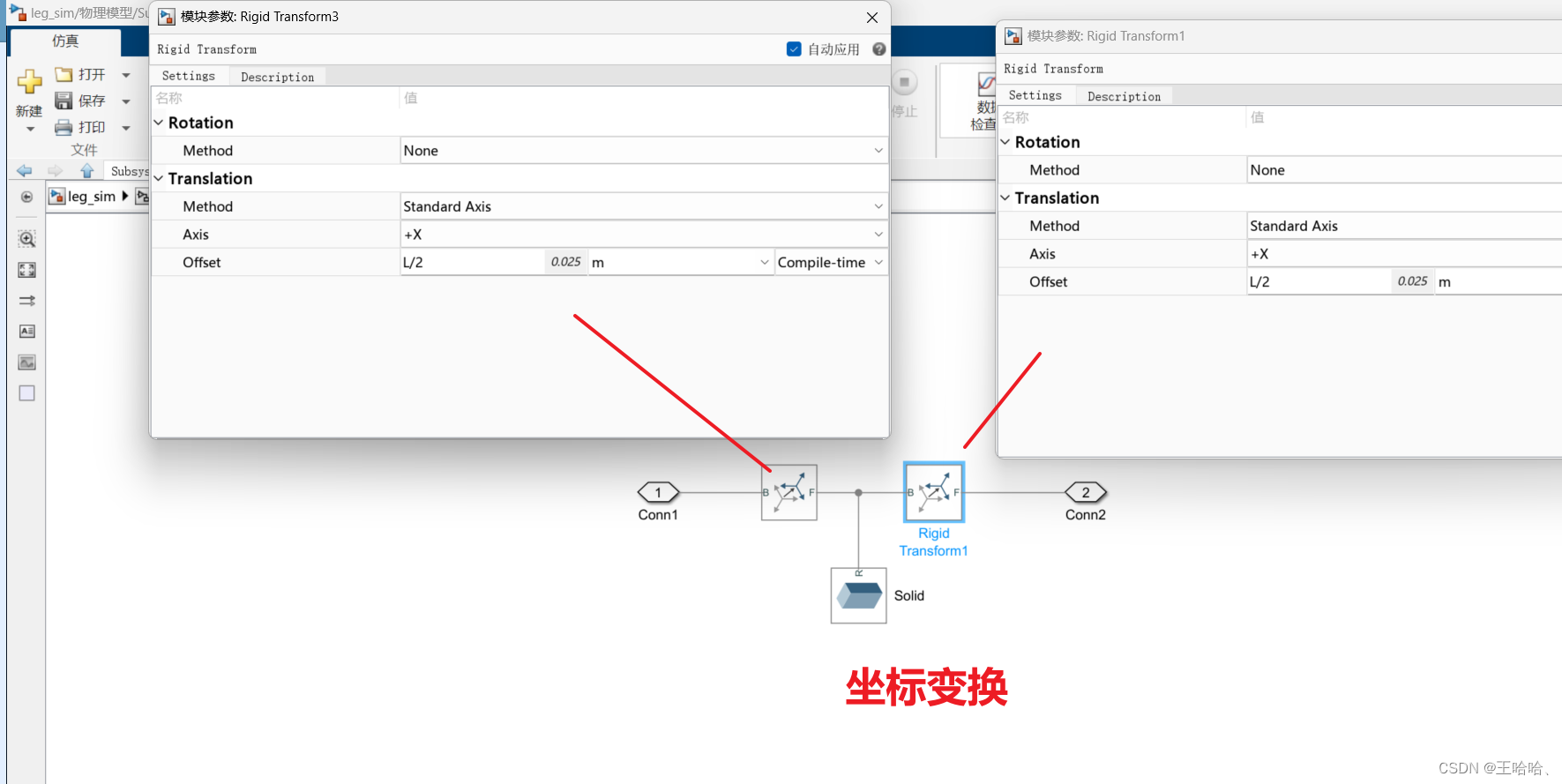
小腿同理

车轮
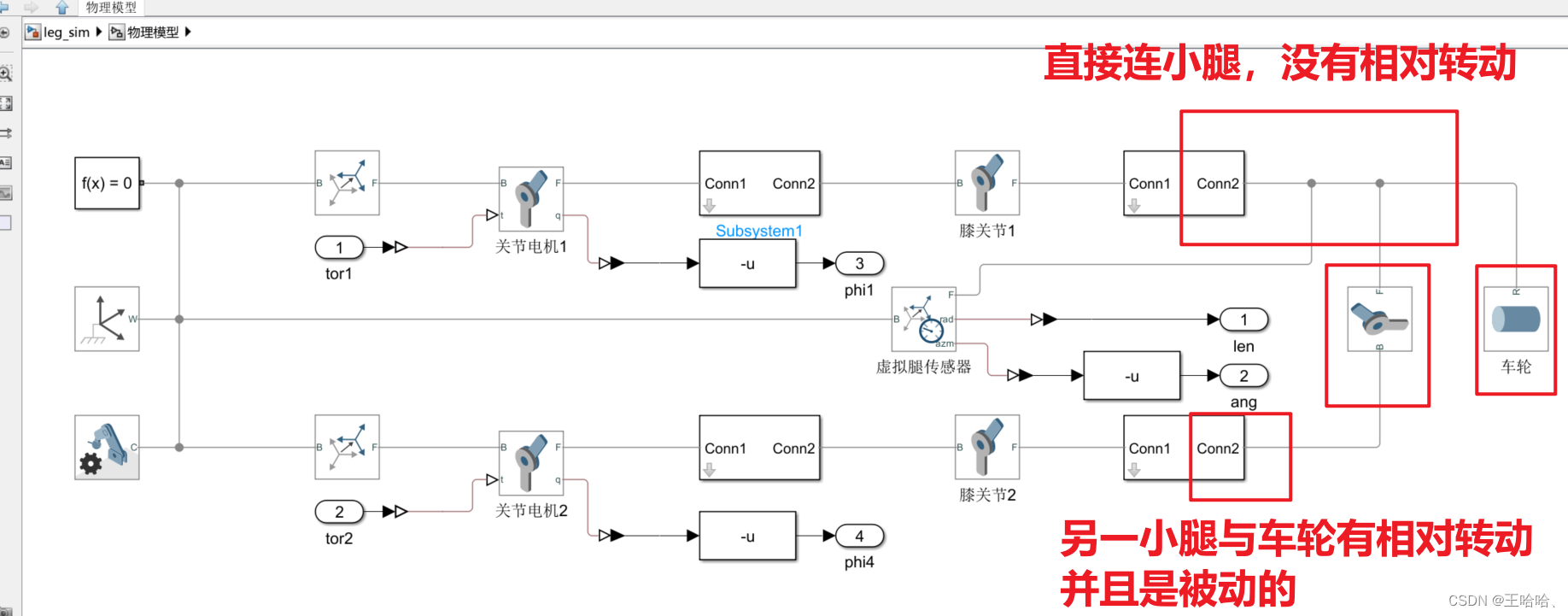
另一边对称
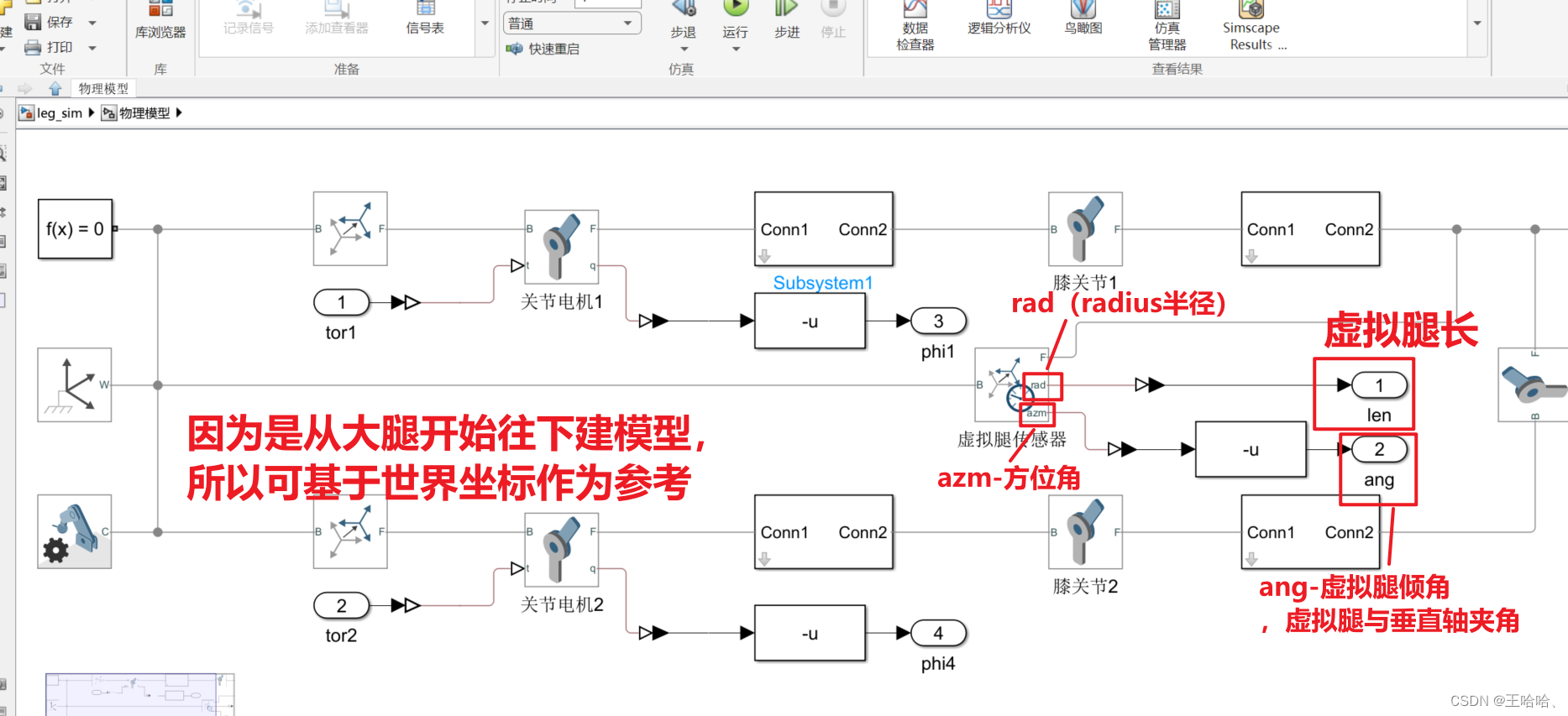
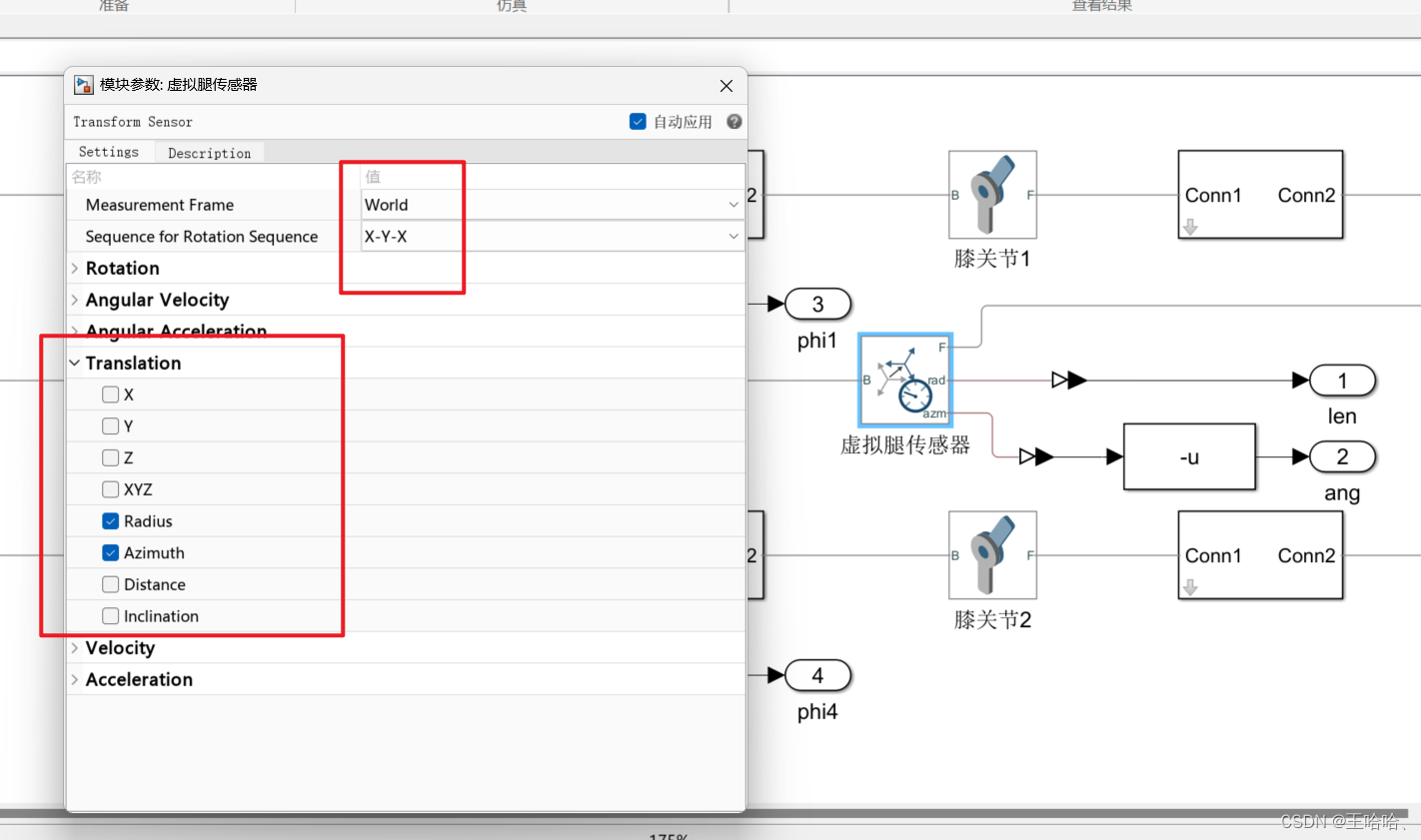
虚拟腿传感器
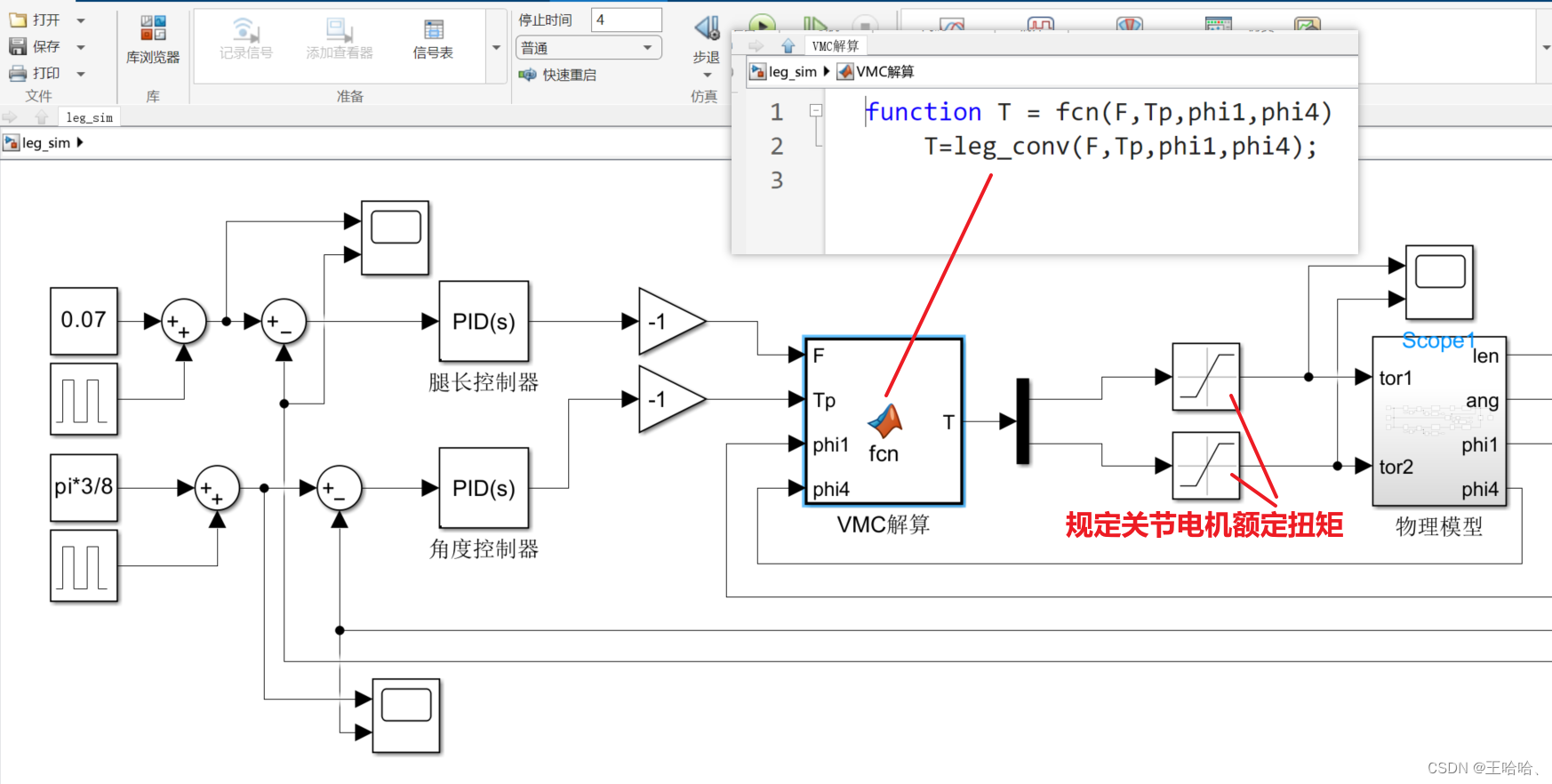
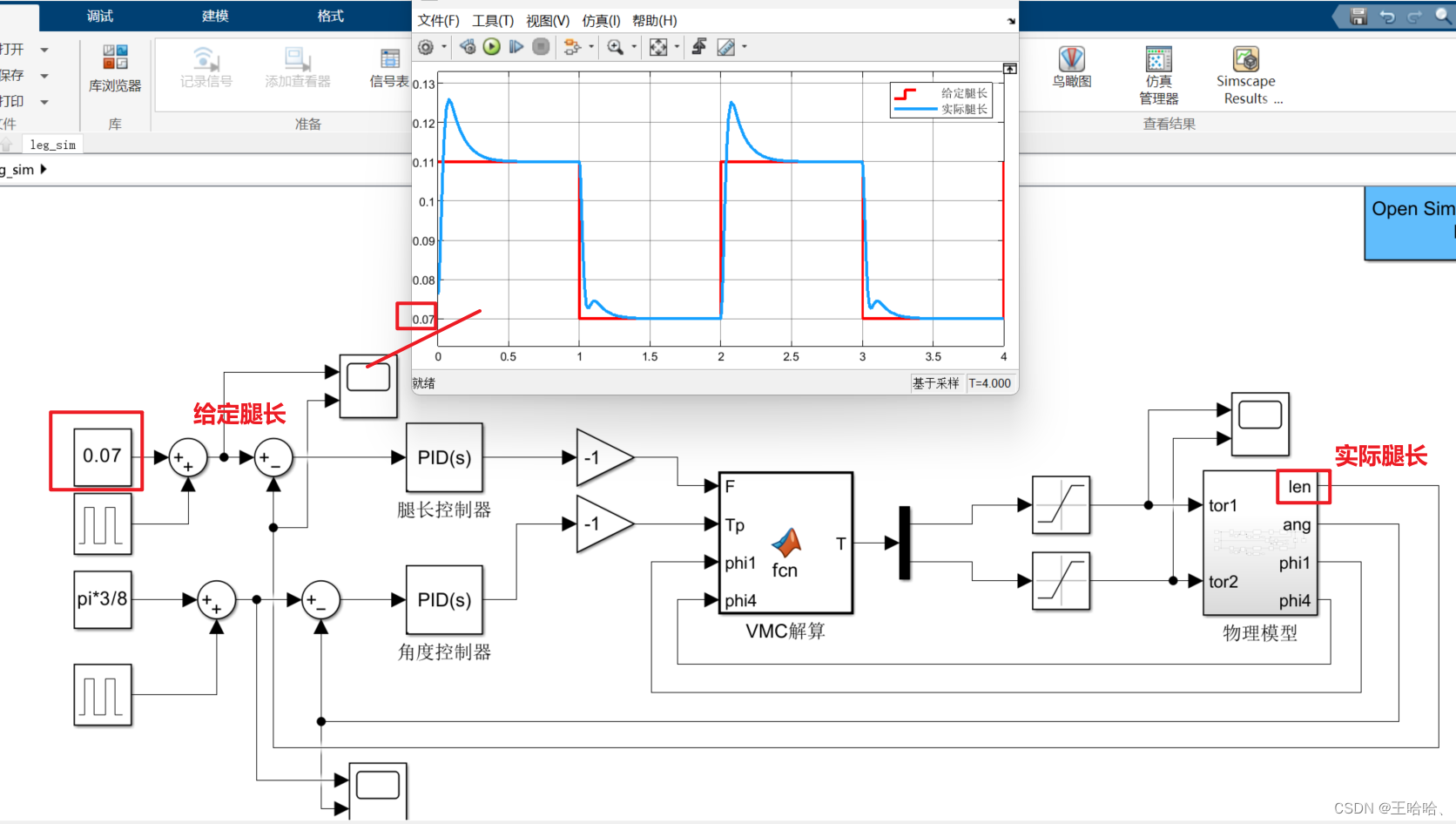
二、控制模型
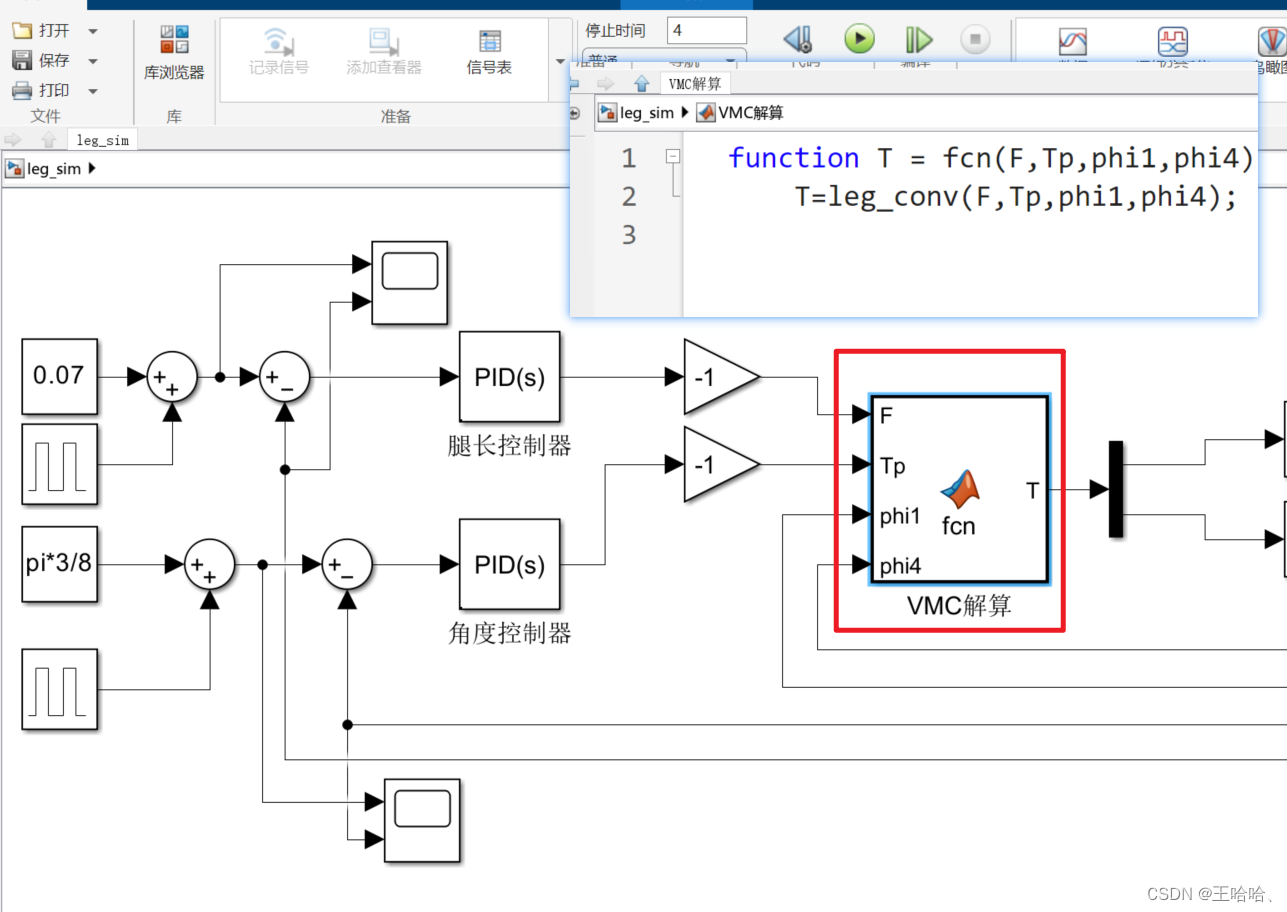
VMC解算五连杆
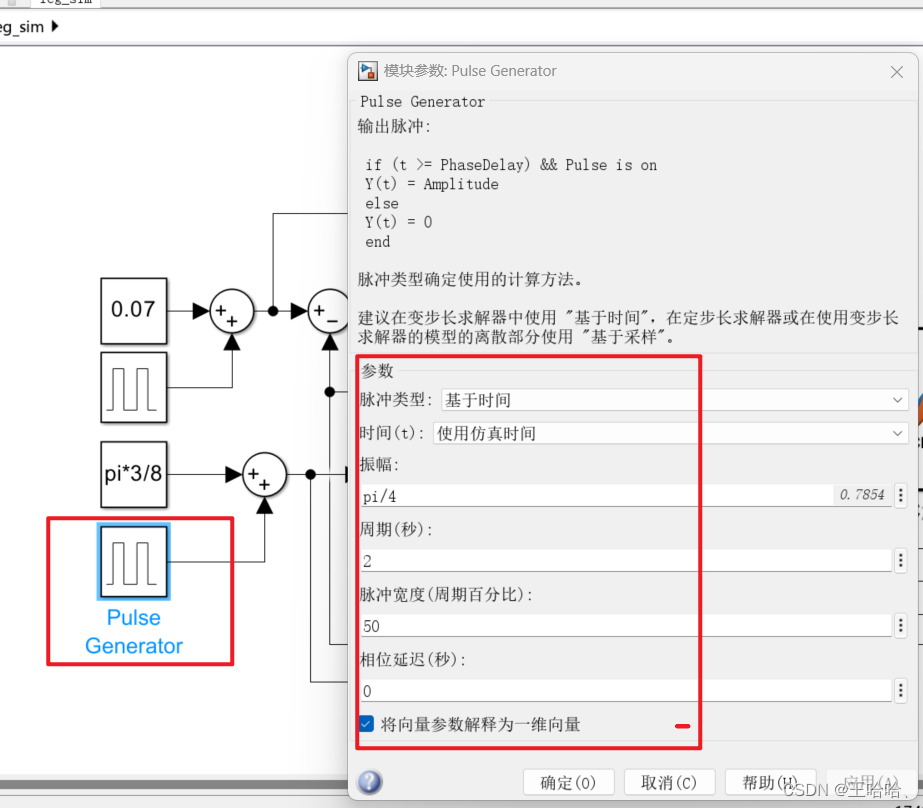
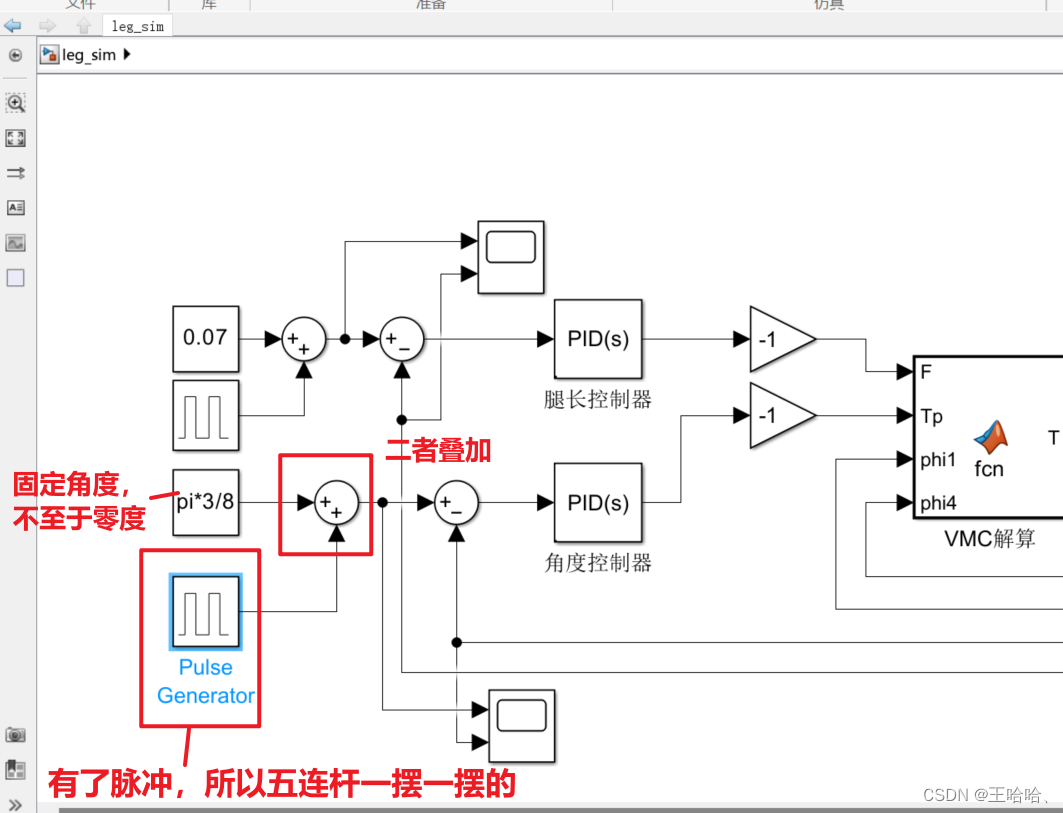
Pulse Generator

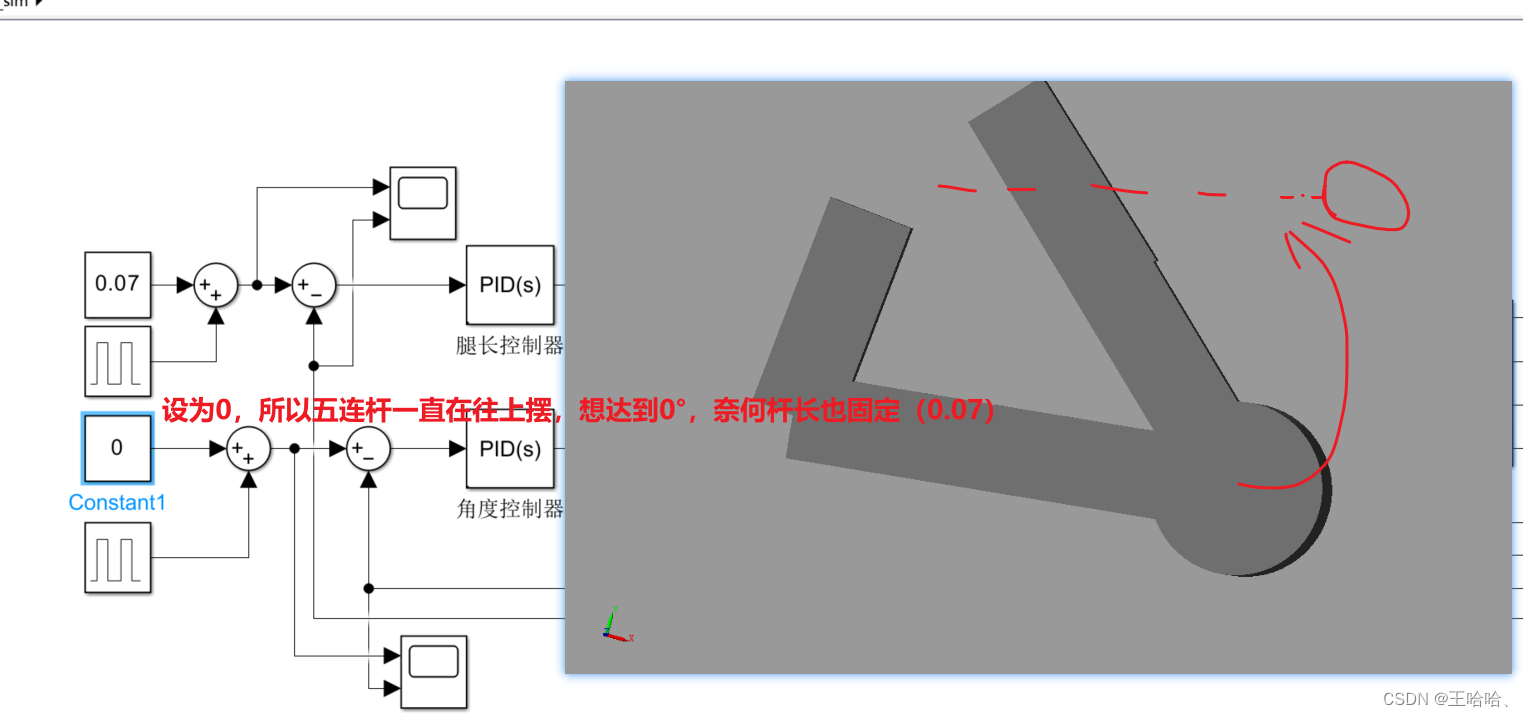
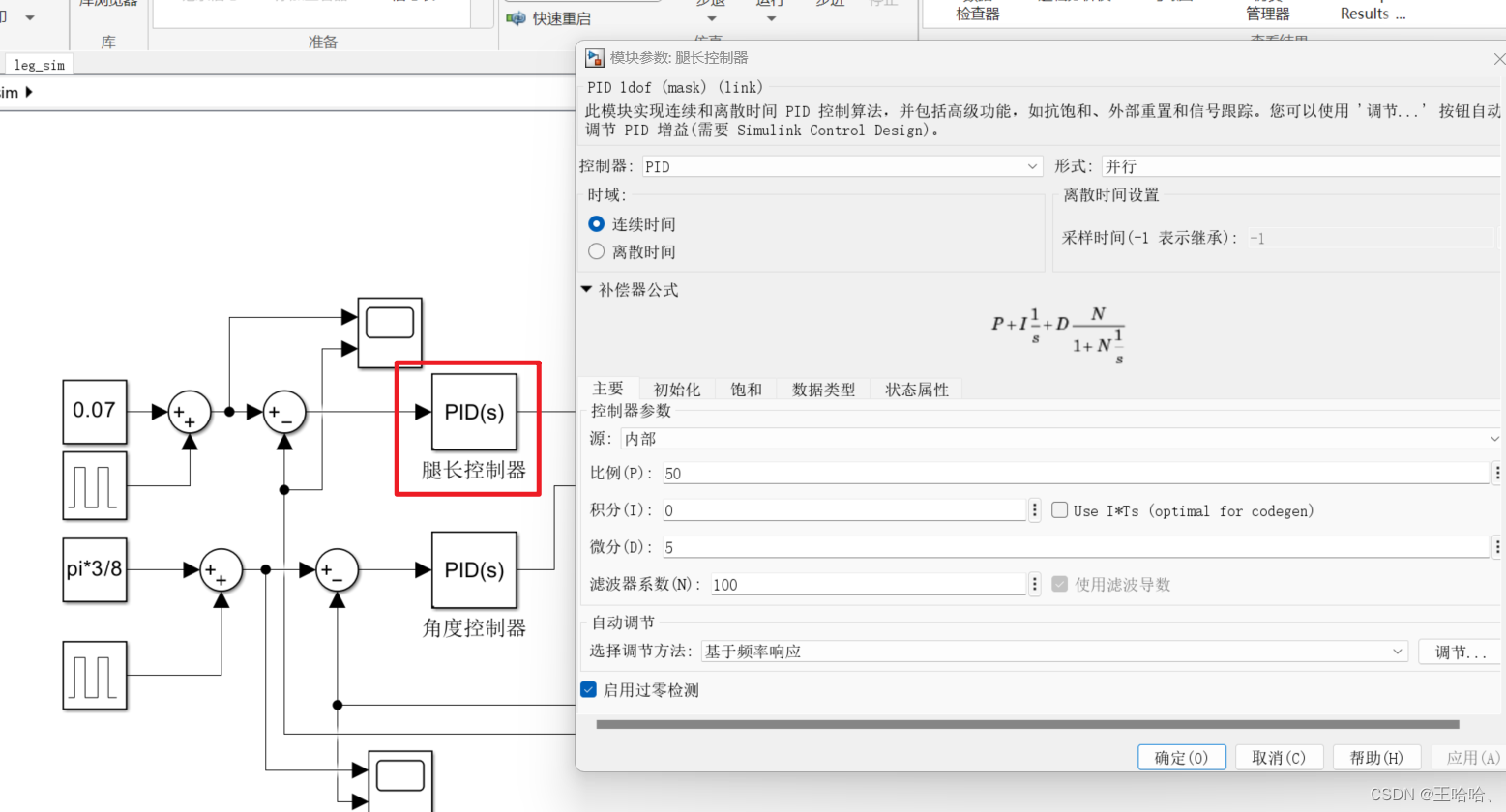
腿长控制器PID
leg_conv.m:可由虚拟腿目标扭矩和推力求得电机所需输出的力矩
4 在QEMU硬件模拟器中运行开源鸿蒙OpenHarmony4.1的操作系统,无需实体开发板
阅读 8
2024-03-02
搭建方程,输入与输入方程
phi1 = -q
小腿同理
另一边对称
虚拟腿传感器
leg_conv.m:可由虚拟腿目标扭矩和推力求得电机所需输出的力矩
相关推荐
精彩评论(0)